System Status at the Progress Review #12 / 13
The full system implementation in Fall can be found here.
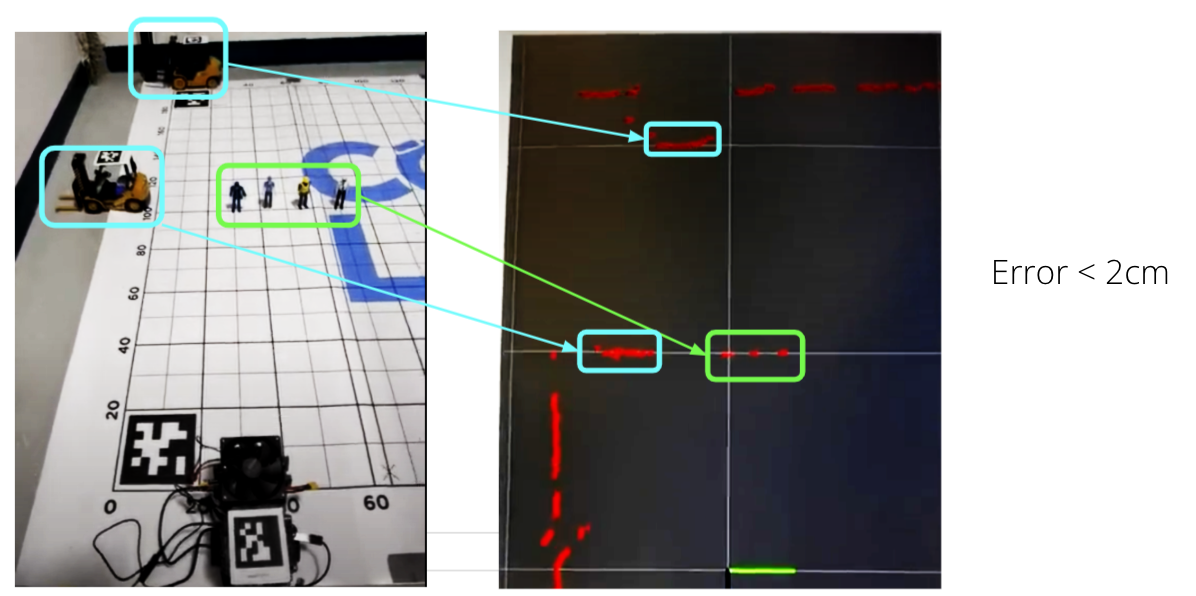
System Status at the Progress Review #11
Sensor fusion of camera / LiDAR perception for pedestrians
System Status at the Progress Review #10
Camera perception has been integrated with the Ground Truth Subsystem.
Automatic precision / recall calculation for detection performance
System Status at the Progress Review #9
Real-time object detection; YOLO deployed to Jetson on our robot.
System Status at the Progress Review #8
We implemented LiDAR perception to detect obstacles and visualize point clouds from LiDAR.
We trained YOLO and performed a preliminary test of its detection and classification performance.

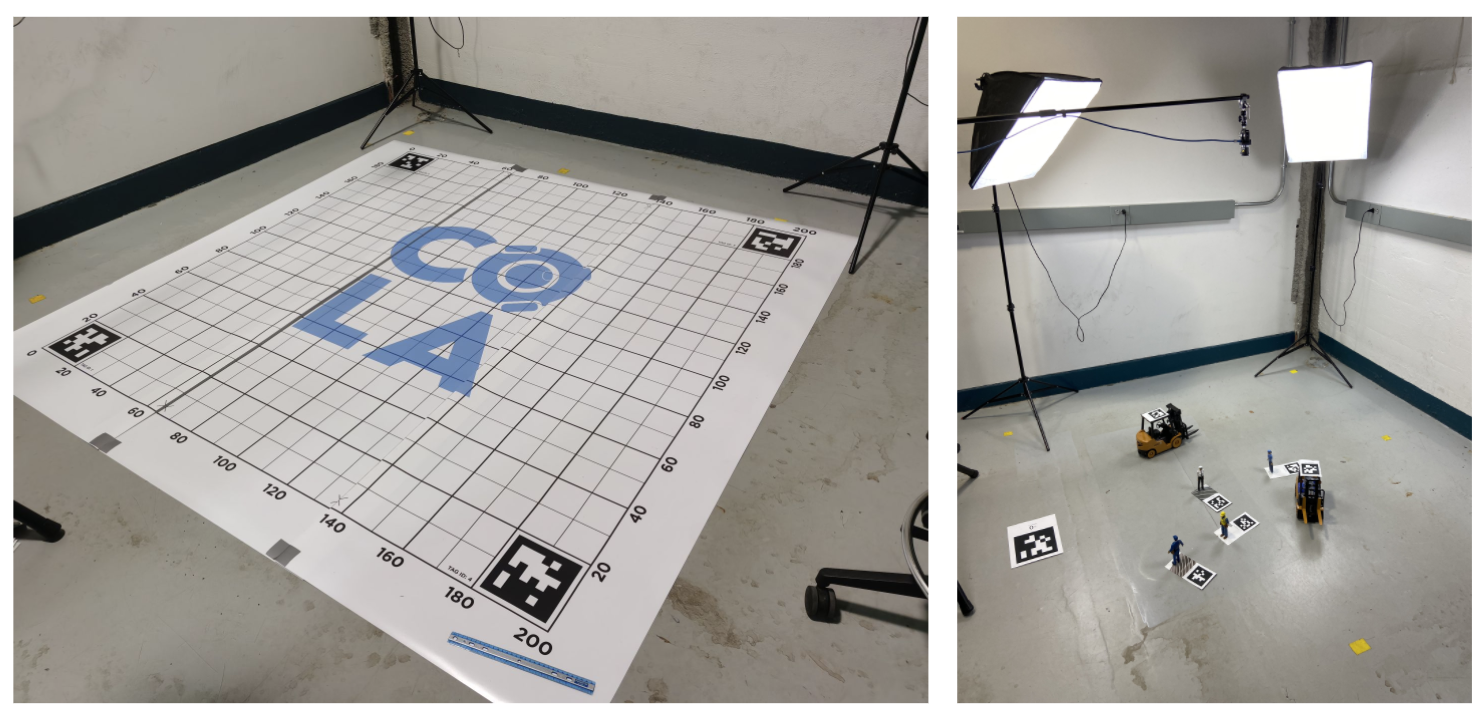
System Status at the Progress Review #7
We built the ground truth subsystem(2m * 2m down-scaled testing environment). We attached April tags to obstacle mockups to detect and localize each obstacles.
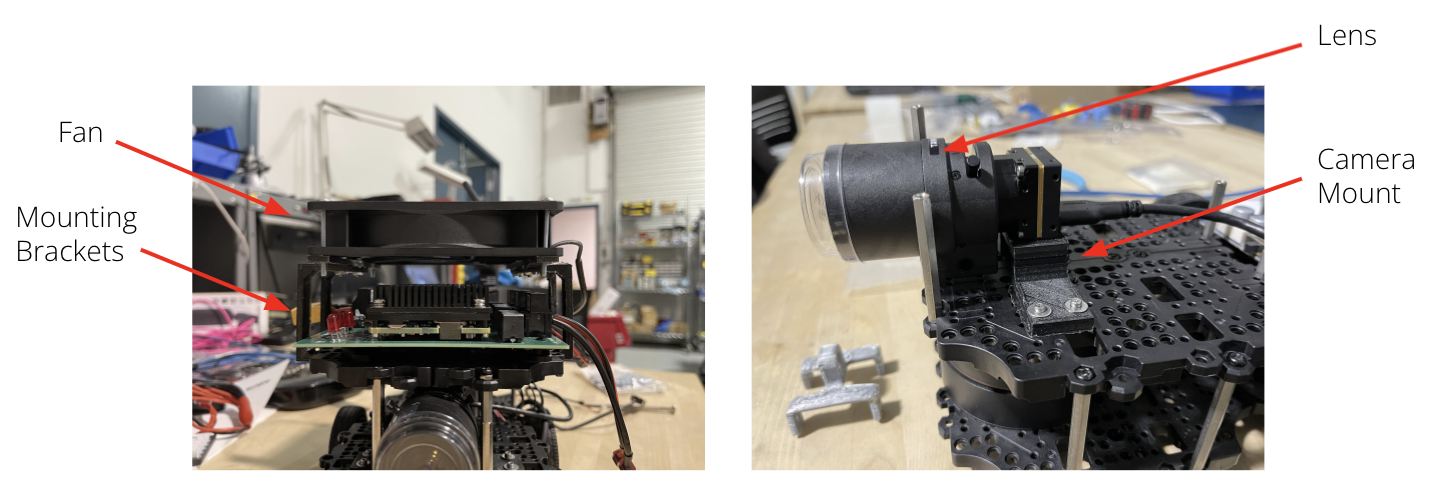
We installed a new camera and PCB cooling fan on the Turtlebot by adding 3D-printed mounts.
We collected and augmented image data; then, we have ~2000 obstacle images. We also labeled them to train the YOLO detection algorithm.

System Status at the Progress Review #5 / #6
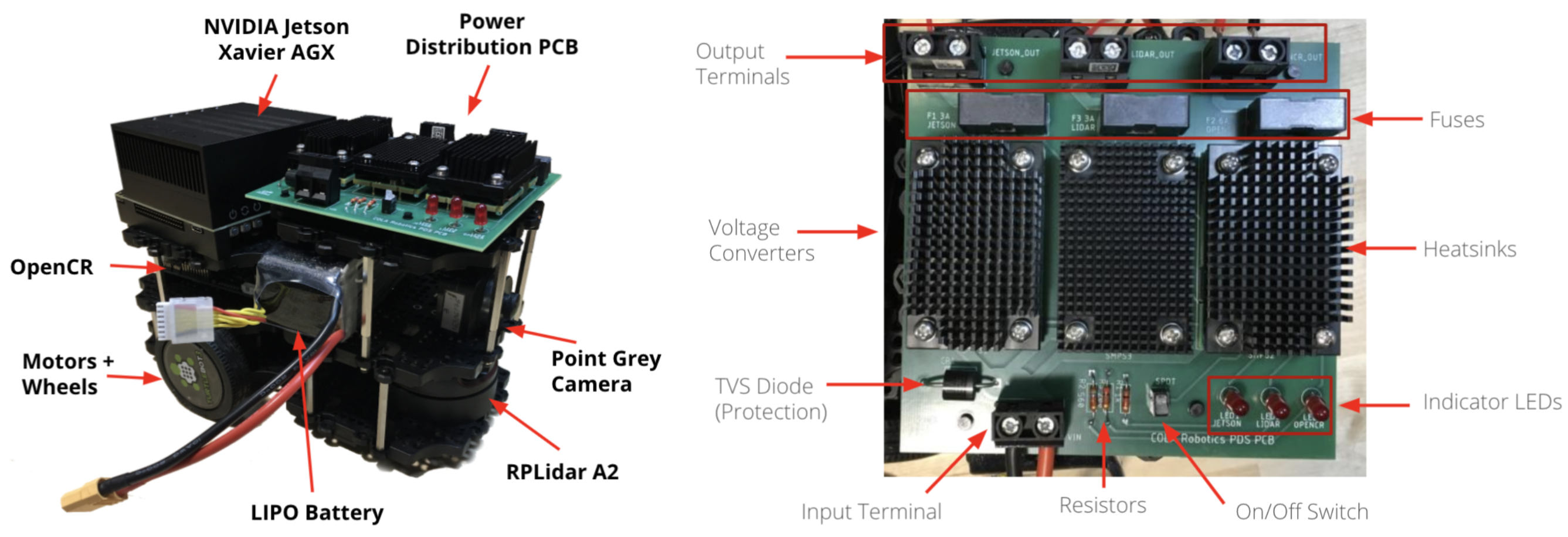
Power Distribution Board
The full system implementation in Spring can be found here. Also, the schematic and layout of the Power Distribution Board can be found here
System Status at the Progress Review #1
Turtlebot Hardware
We have built the Turtlebot hardware for the real-life robotic system
