The slides presented at FVD can be found here
More testing / analysis of parameters can be found here
Virtual Robotic System
The virtual system will:
- Autonomously move with max speed of 1.8 m/s
- Autonomously move with max rotation speed of 60 deg/s
- Autonomously move with min cruise speed of 0.5 m/s
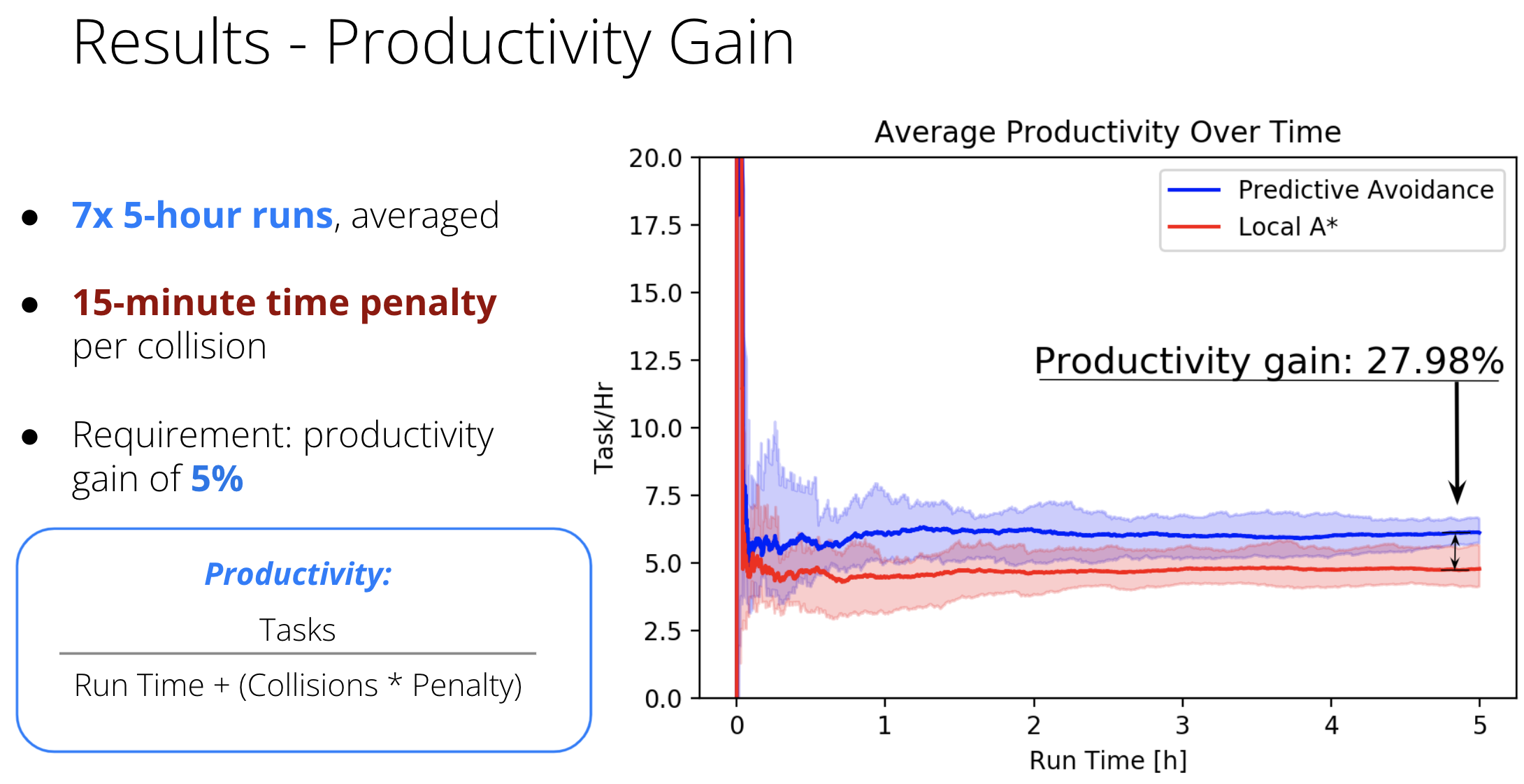
- Increase robot productivity by > 5% using avoidance strategies based on object classification, compared to the nominal avoidance(Local A*)
- Operate in real-time with planning time within 0.1 s
Real-Life System
The real-life system will:
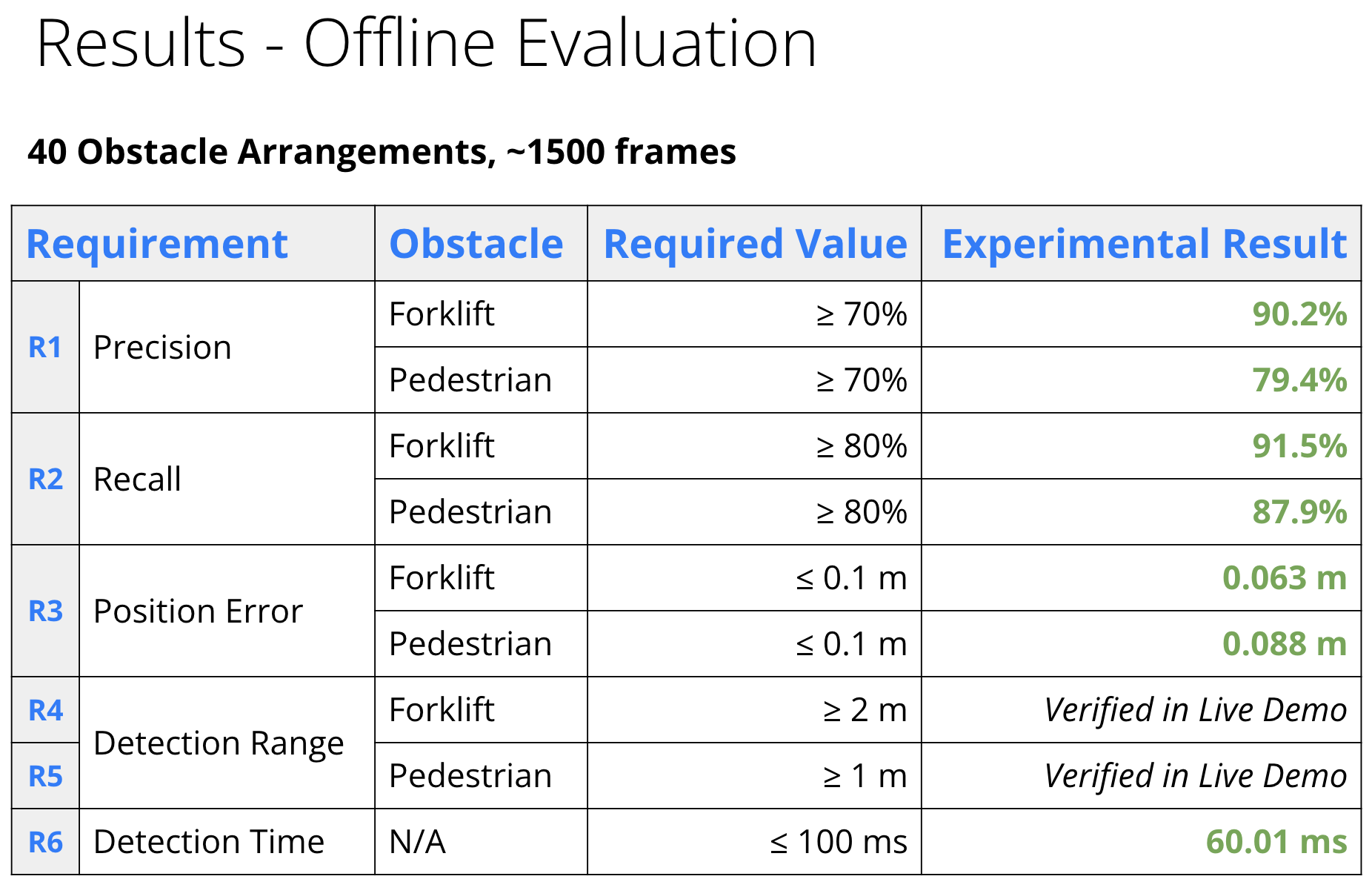
- Classify obstacles with precision of 70%
- Classify obstacles with recall of 80%
- Detect center positions of obstacles of interest within 0.1 m accuracy
- Detect model forklifts within a range of 2 m
- Detect model pedestrians within a range of 1 m
- Output results of positioning and classification within 100 ms per frame