Adding Value One Plant At a Time

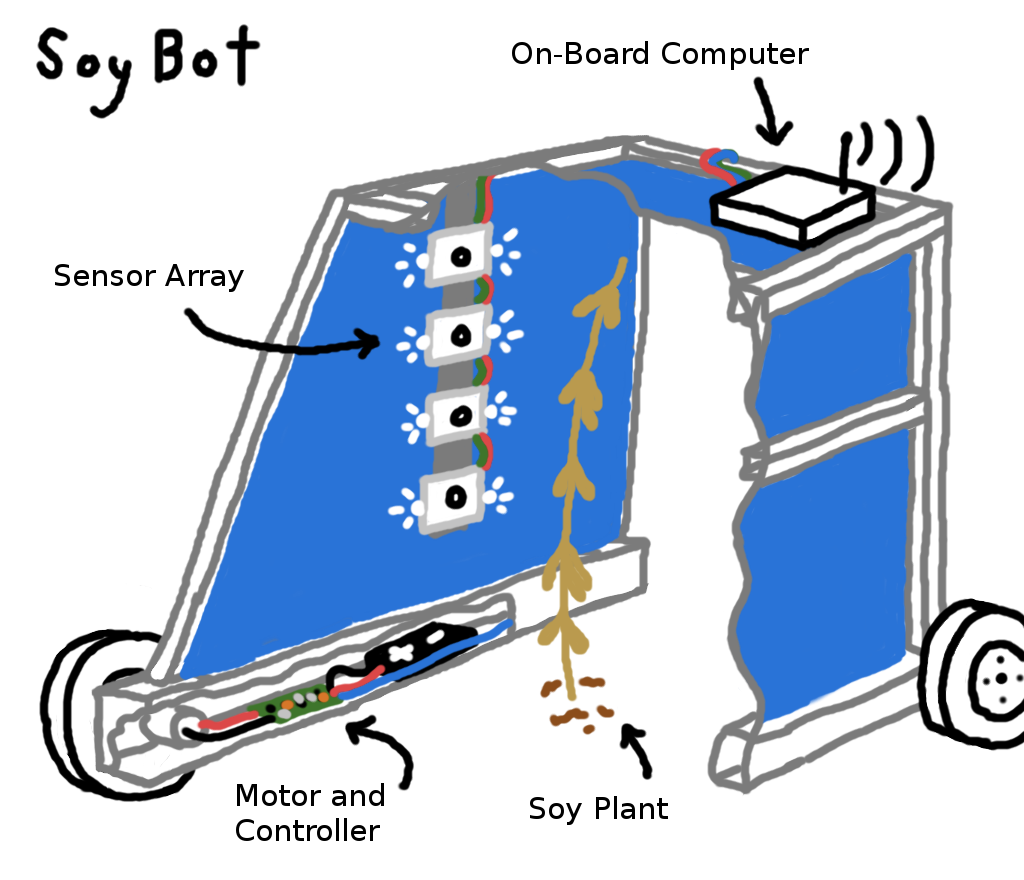
Figure 1.1 : SoyBot
The population of the world is projected to grow 33% by 2050, reaching 9.7 billion people and consequently demanding an increase in the food supply of 70% [1]. The need for a sustainable method to accommodate this demand in the agriculture industry is now more prevalent than ever. To mitigate the food shortage problem the team proposes a robot, SoyBot. SoyBot assists in the yield estimation of one of the most critical crops for vegetable oils and animal protein feed, the soybean.
One of the ways to increase the supply of soybeans is to develop genetically superior soybean crops. In order to develop these new soybeans, genetic designers have to go through a process of evaluating the physical properties of soybeans that they have produced (phenotyping). Currently, soybean phenotyping involves harvesting the crops and spending weeks counting, weighing, and classifying the soybeans. This system is not only tedious, but also extremely expensive, requiring heavy machinery for harvesting, storage space for the harvested soybeans, and people to operate the machines. This is where SoyBot comes in.
SoyBot was envisioned by the team sponsor EIWA [3]. The system overcomes all of the seemingly unavoidable complications by redefining the way yield is evaluated. Instead of physically counting and weighing the soybeans, SoyBot uses vision systems to evaluate the crops on the field, estimating the number of pods, the number of grains, and the dimensions of the soybeans. The processes that currently take weeks and millions of dollars to complete would take a fraction of the time and cost with the aid of SoyBot.
With SoyBot in the fields, genetic breeders and farmers will be orders of magnitude more efficient feeding the people of today and tomorrow.
References:
Dimi owns an agricultural firm named SoyAgro that specializes in soybean cultivation. The demand for soybeans has increased exponentially over the last 2 decades. To meet the demand SoyAgro has invested in a phenotyping lab directed by John.
Every year the lab produces thousands of soybean varieties, requiring hundreds of acres of farmland. Once the soybeans reach the Reproductive Stage 8 (R8 Stage), they need to be tested for their yield. SoyAgro deploys SoyBot for this task.
John goes to the test field with SoyBot. He positions the robot at the beginning of a furrow of soybeans. He then opens the GUI, inputs a label for the mission he is about to start, enters the number of plots to cover and finally presses the start button. SoyBot traverses through the assigned plots and collects image data from the soybeans, as shown in Figure 1.2 . After the SoyBot reaches the end of its mission, John transfers the data collected by SoyBot to a remote computer used to process the data.
Once the processing is complete, the R&D lab receives a detailed report. The report contains an estimate of pod count, pod dimensions and grain count for each soybean variety.

Figure 1.2: SoyBot in Action