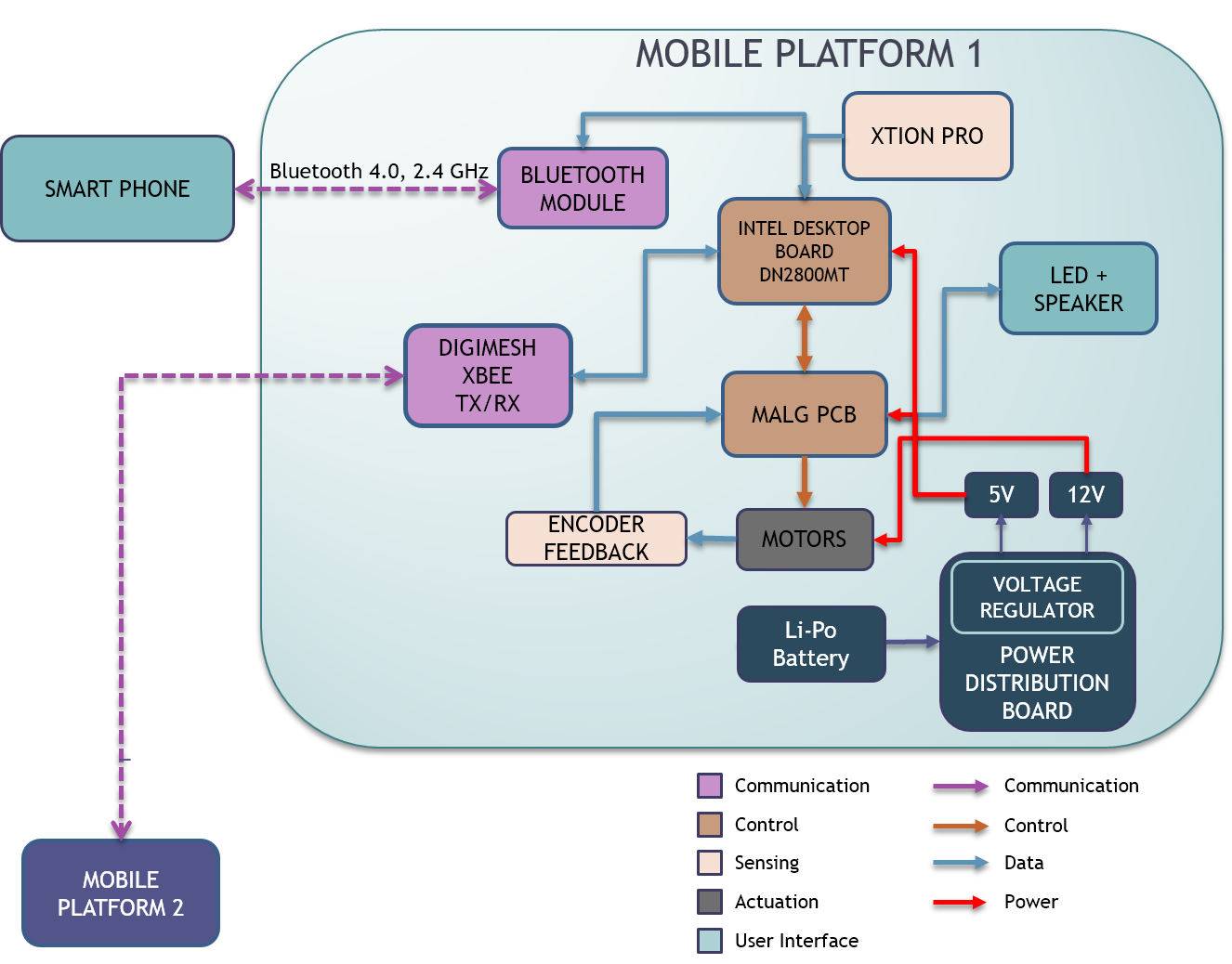
The cyber-physical architectures depict the flow of information within the system and the interaction between the different subsystems. Separate flows have been identified for data, communication signals, and control signals. The power supply provides two voltage levels, 5V and 12V, which are distributed to the entire system as needed. In order to avoid processing overload on one SBC, separate control boards will be used for sensors and actuators in addition to the central SBC. The mobile nodes communicate wirelessly via XBee adapters in a mesh network. The user interacts with the system via Bluetooth using a smartphone.
HARDWARE ARCHITECTURE
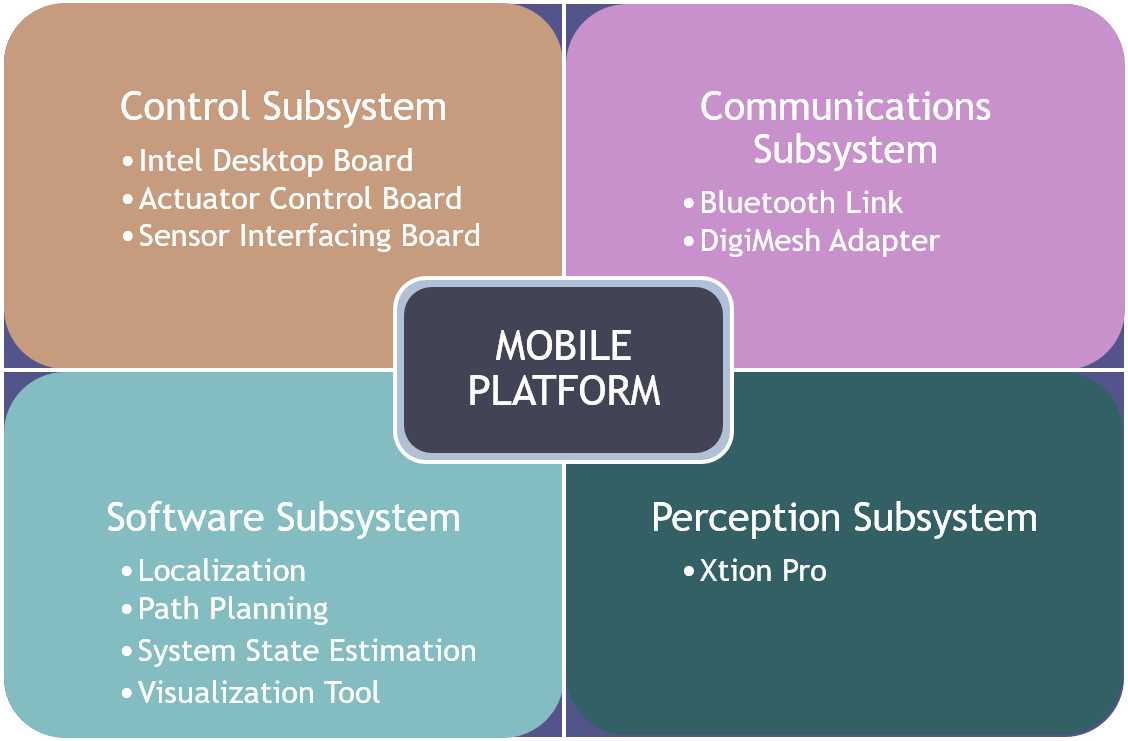
The mobile platform houses all the major subsystems, apart from the mobile app, which exists on the user’s Android phone. Currently, the mobile platform uses an Intel Desktop Board which is running Xubuntu 14.04 and ROS Indigo. The platform also has a depth sensor (Xtion Pro) for mapping, localization and navigation. The DigiMesh XBee and Bluetooth 4.0 adapters are connected via USB to the SBC and act as Serial Ports for communication. The Oculus Prime platform comes with a power distribution board that accepts 12V from the LiPo battery and then powers the DC Motors and the SBC through it
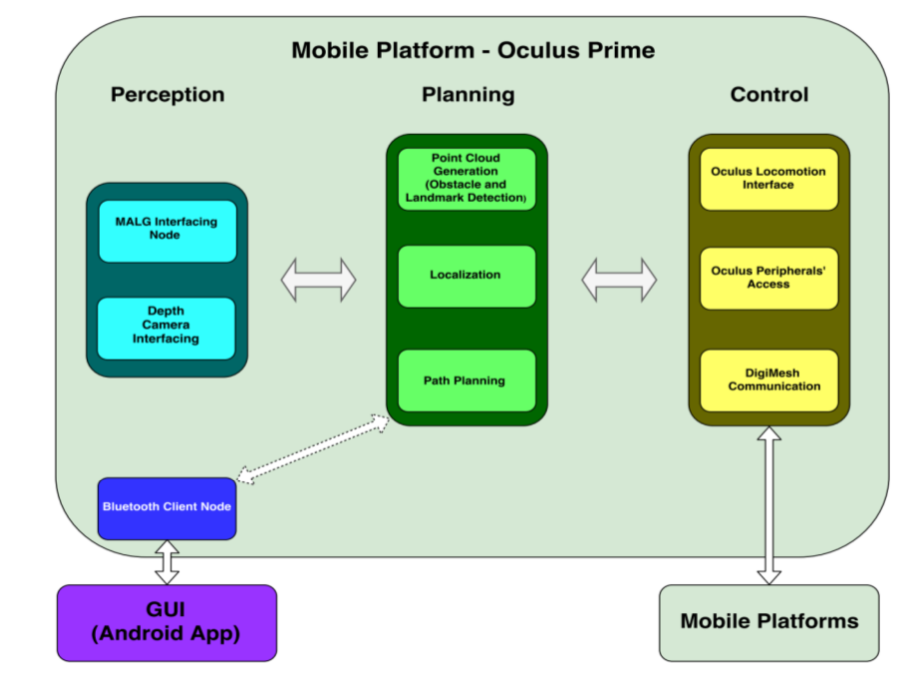
Software Architecture
The software architecture is based on the simple principle of sense, think, and act, denoted by Perception, Planning, and Control. Perception helps in interfacing with the environment and getting raw data, which then gets processed by Planning. Planning carries out path planning, localization, and uses the point cloud data to detect various objects in the vicinity of the robot. All of this information is then further transmitted to Control, where the robot carries out locomotion and also collaborates with other robots by sharing relevant data.