
Project Description
The imminent arrival of driverless cars has led to an increased focus on the development of an ecosystem that supports them. This project, “Auto-Park for Social Robots”, aims at developing an autonomous system for collaboratively parking driverless cars.
The motivation for the project stems from key factors affecting the current parking system, such as poor parking safety standards, parking industry growth potential, and a competitive advantage of developing such a system. According to reports by Fayard and Stark, around 20% of all automobile accidents occur inside parking lots. About 90% of the people involved in these accidents are injured. The parking industry is worth $25-$30 billion and has potential to invest in upgrades [1] [2]. It regularly bleeds money to accident insurance claims, as well as public transportation due to people that take the bus rather than find a spot in a congested lot. The precious time wasted while searching for a parking spot, translated into lost revenue, is also a motivation behind the project.
This project consists of two distinct systems:
1) A physical system which consists of a scaled-down version of a car (mobile platform) that would be able to receive a “Park” command from the user’s Android app, localize itself in a parking lot, collaborate with other cars to identify the best possible parking spot, navigate to the spot, and avoid any obstacles in the process. The vehicle would relay its status to the user’s app at specific times. Upon receiving the “Return” command, the vehicle would then exit the parking spot and navigate to the parking lot exit. The main focus is on establishing a robust system for effective collaboration between vehicles.
2) A simulation system which helps in showcasing the potential benefits of implementing such a collaborative system at a large scale in terms of saving time for the user. Various optimization techniques are employed to efficiently plan and schedule the parking of large number of vehicles with collaboration and data sharing between vehicles as a central theme.
Keywords
- Optimal Spot – The optimal spot is the parking spot with the shortest optimal route between that spot and the exit. The optimal spot must also be unoccupied.
- Optimal Route – Also called Optimal Path. The route is from the vehicle’s current position to the optimal spot or to the exit, depending on the vehicle’s status. It is optimal because it takes the least amount of time to traverse.
- Vehicle – Also called Mobile Platform or Robot. This serves as the test platform to implement and showcase the collaborative and autonomous aspects of the project, such as path planning, navigation, communication, and obstacle detection.
- Vehicle Status – The vehicle can be in the following states:
- Free – The user has not yet told the vehicle to park. The vehicle is waiting for a command.
- Parking – The vehicle has been told to park by the user. The vehicle is heading towards the optimal spot, but has not reached it yet.
- Parked – The vehicle is stationary within the parking spot.
- Returning – The vehicle has been told to return by the user. The vehicle is heading towards the parking lot exit, but has not reached it yet.
- Returned – The vehicle is at a complete stop in the parking lot exit and is waiting for the user.
- Parking Lot – The parking lot is a single-level testing area with a known entrance, exit, and known parking spots. The lot will fit the size of the vehicle.
Description
The imminent arrival of driverless cars has led to an increased focus on the development of an ecosystem that supports driverless cars. This project, “Auto-Park for Social Robots”, aims at developing an autonomous system for collaboratively parking driverless cars. The project, as envisioned by the team and the sponsor, United Technologies Research Center, would allow a person with a driverless car to park the vehicle by simply pressing “Park” on their Android App.
The motivation for the project stems from key factors affecting the current parking system, such as poor parking safety standards, parking industry growth potential, and a competitive advantage of developing such a system. According to reports by Fayard and Stark, around 20% of all automobile accidents occur inside parking lots. About 90% of the people involved in these accidents are injured. The parking industry is worth $25-$30 billion and has potential to invest in upgrades. It regularly bleeds money to accident insurance claims, as well as public transportation due to people that take the bus rather than find a spot in a congested lot. The precious time wasted while searching for a parking spot, translated into profit, is also a motivation behind the project.
Auto-Park for Social Robots would consist of a scaled-down version of a car (mobile platform) that would be able to localize itself in a parking lot, collaborate with other cars to identify the best possible parking spot, navigate to the spot, and avoid any obstacles in the process. The vehicle would then exit the parking spot and navigate to the parking lot exit. The team’s main focus is on establishing a robust system for effective collaboration between vehicles and developing an advanced planning simulator.
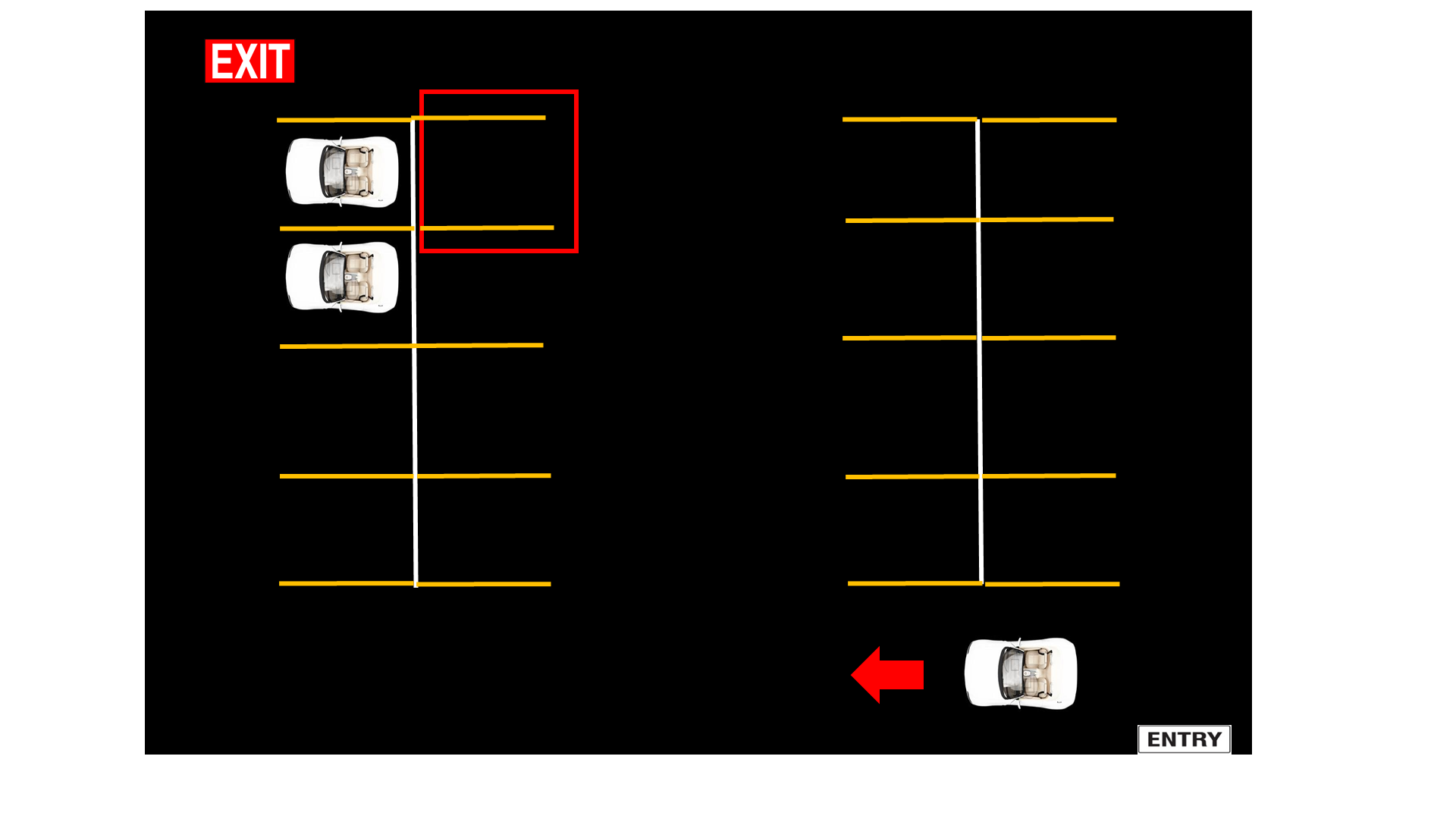
Entering Parking Lot
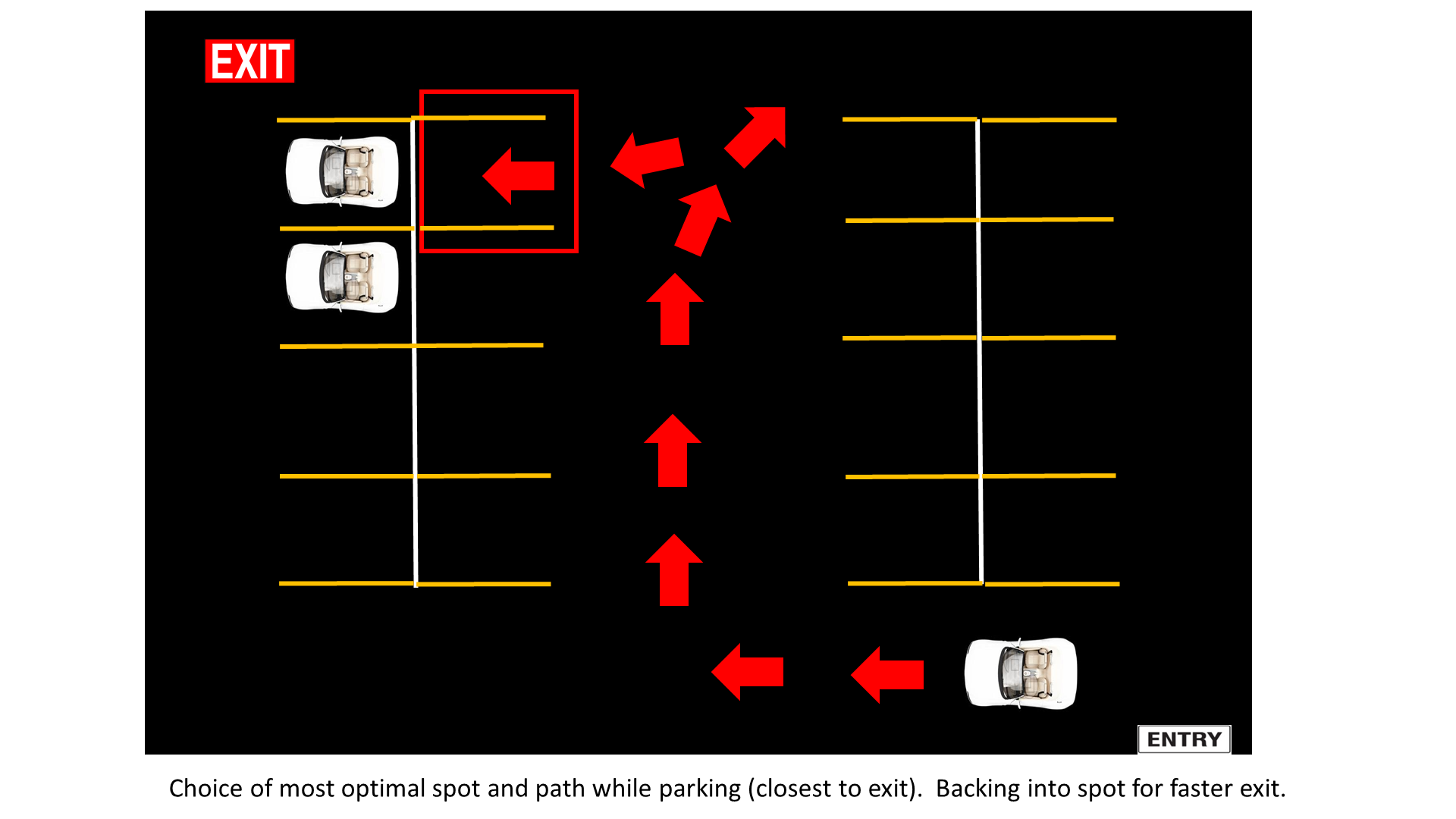
Choosing Optimal Spot
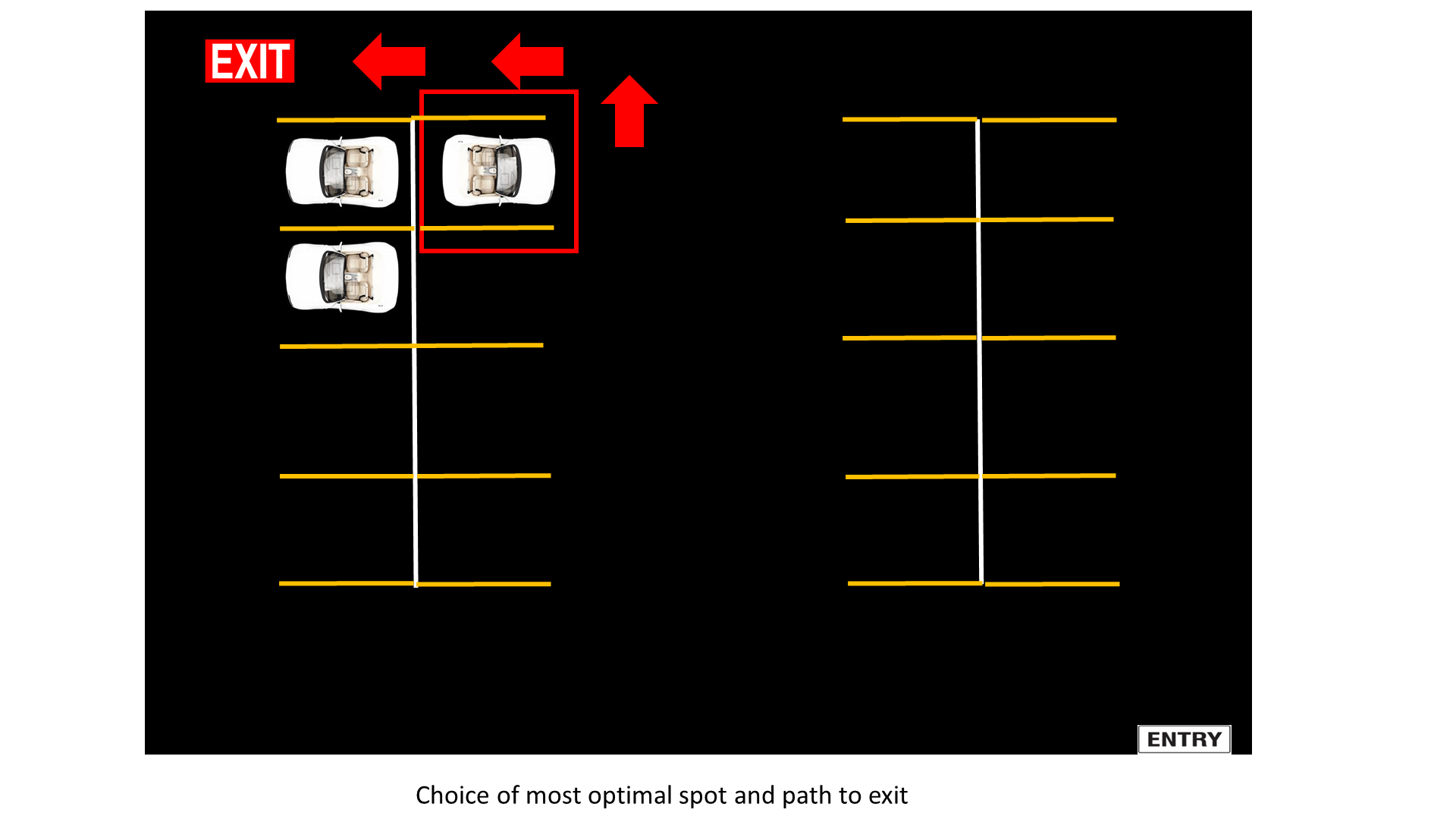
Exiting Spot and Lot
Auto-Park for Social Robots will use both physical vehicles and virtual vehicles. Each of these vehicles can be seen using the visualization tool. This tool has the ability to add and remove virtual vehicles from the parking lot, thereby creating more complex scenarios with crowded parking lots. By having virtual vehicles, the full capabilities of the Auto-Park system can be demonstrated without the need for many physical platforms.