The risk management categories are as follows:
- ID: Number used to reference risk
- Description: Brief description of the risk
- Responsible Party: Indicates who is in charge of handling the risk.
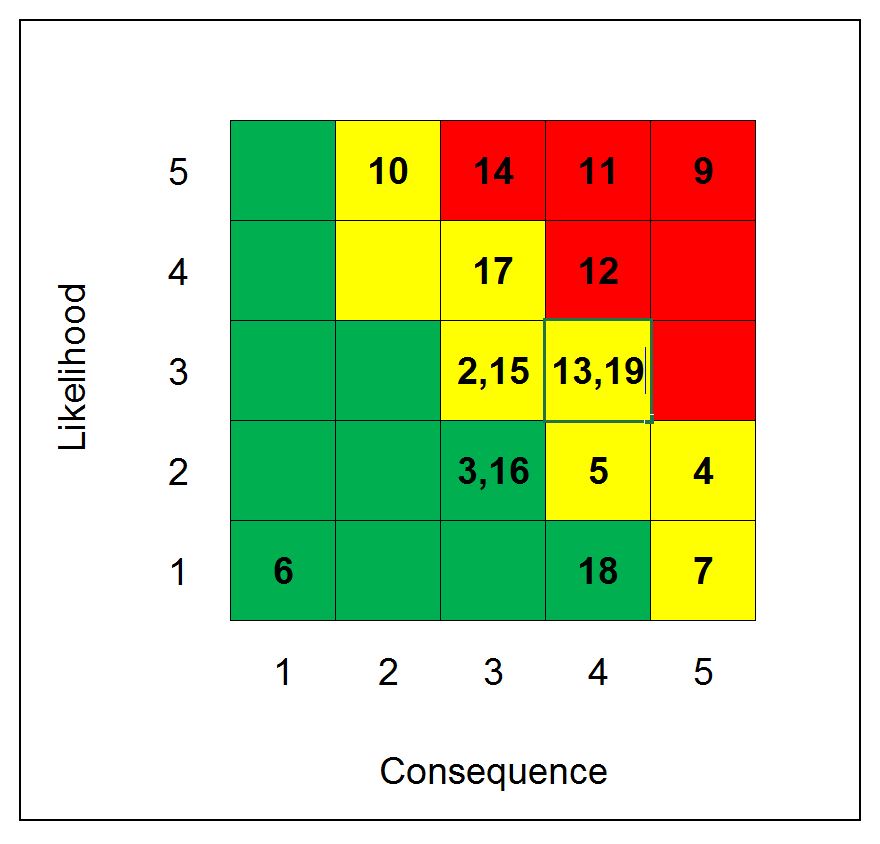
- Risk Analysis: The risk analysis has two numbers representing the ranking of the consequence of the risk and the likelihood that the risk will be realized. A chart of these consequences and likelihood can be found below the table of risks.
- Area of Impact: Time, cost, quality, other
- Handling Strategy: How the risk will be handled?
- Status: What is currently being done to handle the risk
| ID | Description | Responsible Party | Risk Analysis (Consequence x Likelihood) | Area of Impact | Handling Strategy | Status |
|---|---|---|---|---|---|---|
| 1 | No Mobile Platform | Mohak | N/A | Technical,Schedule, Cost | Check Status with sponsor regularly, Set final deadline for platforms to arrive. Email list of MPs to sponsor. Meet with sponsor. Purchase test platform. | Closed |
| 2 | Inadequate Mobile Platform | Shivam | 3x5 | Technical | Review platform needs Only select adequate platform | Closed |
| 3 | Unsuitable Smartphone Interface | Dorothy | N/A | Technical, Programmatic | Frequent and extensive testing | Closed |
| 4 | Subsystem Incompatibility | Pranav | N/A | Technical, Schedule, Cost, Programmatic | Research on ROS to ensure compatibility. Software architecture to ease integration. Carry out low level cross compatibility tests. | Closed |
| 5 | Too Many Requirements | Shivam | N/A | Schedule, Programmatic | Trimmed requirements. Separated mandatory from desirable. Appointed PM. Begin big weekly scrums. Created Kanban cards. | Closed |
| 6 | Inaccurate Parking Lot and Obstacles | Richa | 1x1 | Programmatic | Analyze parking lots IRL. Scale to match mobile platform. | Closed |
| 7 | ROS Related Issues | Pranav | 5x1 | Technical | Arduino/ROS testing. Android/ROS testing. ROS-ROS serial communication. | Closed |
| 8 | SBC and Platform Incompatibility | Mohak | N/A | Technical, Schedule, Cost, Programmatic | Test MinnowBoard Max borrowed from Team C | Closed |
| 9 | MinnowBoard Max Processing Power Limitations | Mohak | N/A | Technical, Programmatic | Test SBC thoroughly to investigate other possible problems. Research alternative, more powerful SBCs | Closed |
| 10 | Closing Bluetooth Port | Dorothy | 2x5 | Technical | Hardcode port number into script. Close port by keystroke on SBC side. Close port when app closes on Android side | Closed |
| 11 | Mobile Platforms don't arrive on time | Shivam | 4x5 | Technical,Schedule,Cost | Check Status with sponsor regularly, Talk to Prof. Dolan regarding additional platform. | Closed |
| 12 | Data latency in subsystems | Team | 4x4 | Technical | Early and Extensive Testing | Closed |
| 13 | Interference in Bluetooth and multiple Xbees | Dorothy, Richa | 4x3 | Technical | Early identification and fixing requirements accordingly | Closed |
| 14 | Components arriving late | Team | 3x5 | Schedule, Cost, Programmatic | Order many extras, ordering well in advance, contingency plans and immediate action | Closed |
| 15 | Dependence on Oculus Prime ROS packages | Pranav | 3x3 | Schedule Technical | Alter system design accordingly as soon as loopholes or dead-ends are identified | Closed |
| 16 | Dependency of localization on mapping capabilities and parking lot complexity | Mohak | 3x2 | Programmatic, Technical | Keep design of parking lot as simple and “feature rich” as possible | Closed |
| 17 | Multiple points of hardware related failure in perception and communication | Shivam, Richa | 3x4 | Programmatic Technical | Incremental integration and testing during development | Closed |
| 18 | Inconsistencies in communication and planning logic | Richa | 4x1 | Technical | Incremental integration and testing during development | Closed |
| 19 | Navigation Issues in Parking Lot | Shivam, Pranav | 4x3 | Technical | Extensive Testing, Modification of Nav. Stack | Closed |