Individual lab reports:
Ongoing Work:
- Get all the systems flight ready: Ensure code starts automatically and
starts logging data. - Assist Nick with flight system hardware integration
- Conduct flight tests: Fligth data logging, Point cloud data logging and
full system test except camera.
Past work:
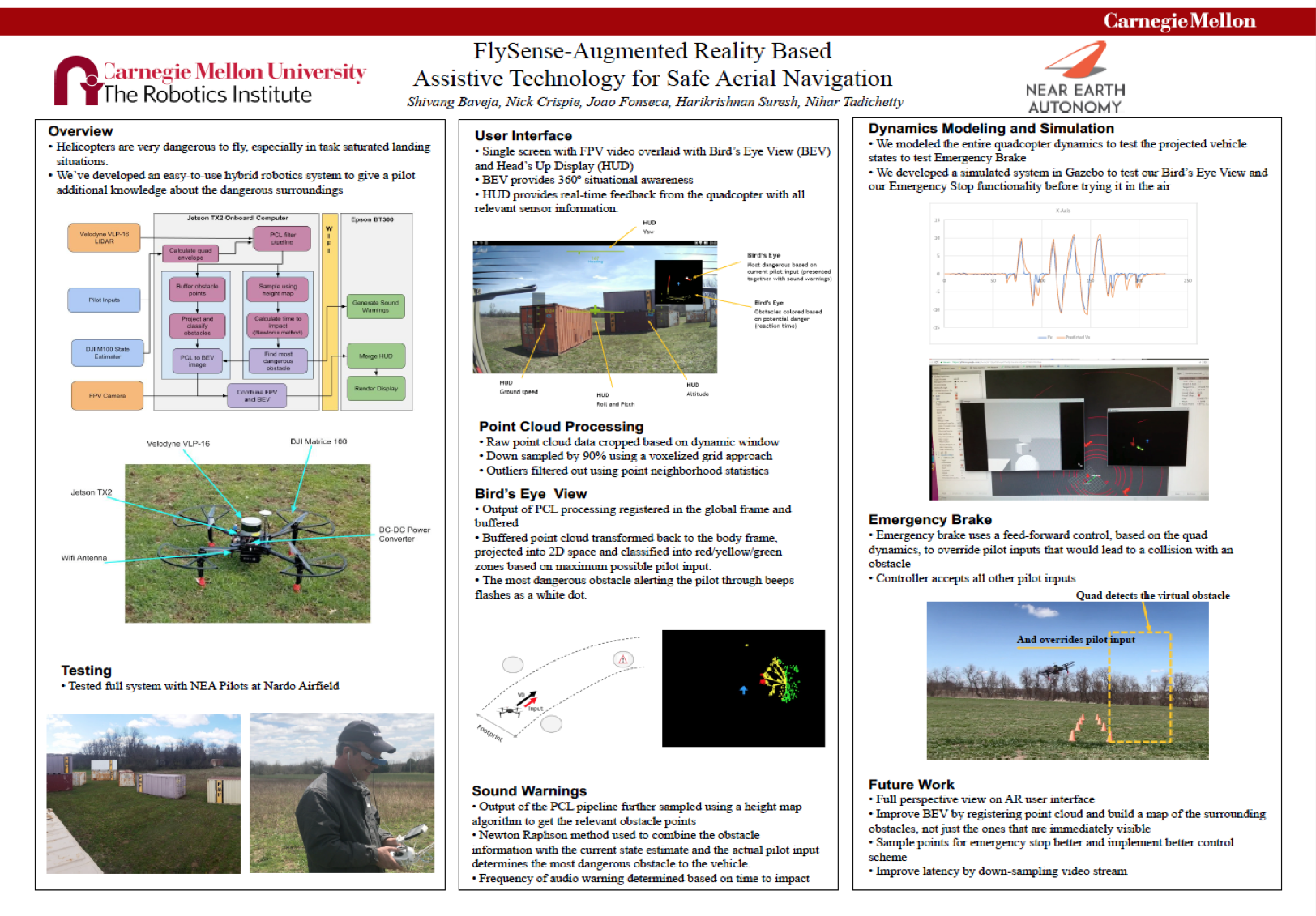
On-board software architecture:
PCL Cropbox filter implementation:
- Onboard software interface with AR controller
- Onboard software interface with DJI Matrice 100 Quadcopter
- Testing pf pose estimate
- pre-processing of NEA lidar data sets
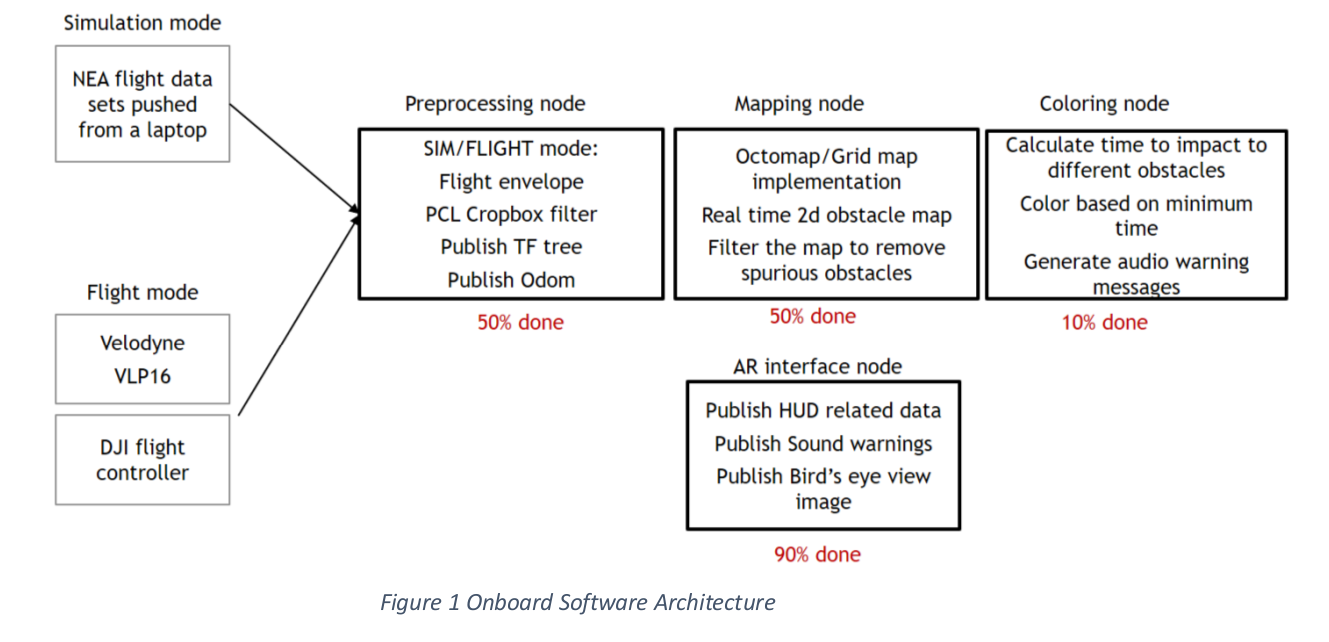
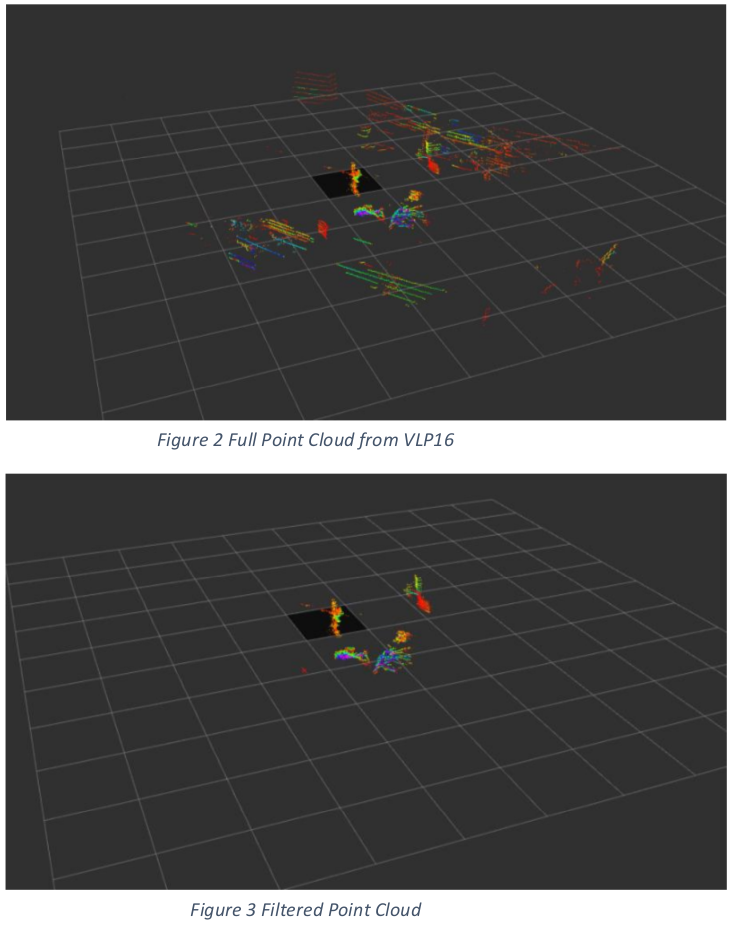
- Crop box filter based on flight envelope dynamic window.
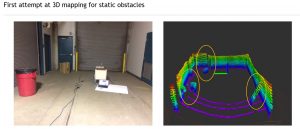
- Generating Occupancy grid map with Velodyne VLP-16P Puck Lidar with static and dynamic objects.
- Feasibility of using Microsoft Hololens in ROS based environment.
- Conducted interview with Helicopter Pilots to get feedback on UI/UX design.