Cyberphysical Architecture
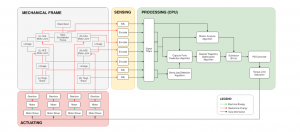
The cyberphysical architecture of the hip exoskeleton displays the flow of energy and information through the various hardware and software components within the system. The ar- chitecture is organized into four subsystems: the mechanical frame, sensing subsystem, processing subsystem, and actuating subsystem.
The mechanical frame subsystem carries out the function of providing physical structure to the exoskeleton and interfaces between the human user and the system to transfer the user’s physical state information to the sensors. The various sensors within the sensing subsystem would then carry out the function of receiving information from the movement and current states of the exoskeleton, and thus the user’s, hip and hip joints. This signal information from the sensors is then passed on to the system’s CPU, where all processing and computation will happen. The processing subsystem will take in raw sensor data, filter the data, and then use it to predict the user’s optimal hip motion for staying in balance. It will then determine the error between the predicted optimal and the current user motions. With this error value, the processing subsystem will then implement a control system to output corrective torque values to the actuating subsystem. The motor torque values calculated from the processing subsystem will be passed into the motor drivers in the actuating subsystem. The actuating subsystem will drive the motors to actuate the exoskeleton joints in the mechanical frame and correct the user’s movements.