Problem Description
Once first responders arrive on the scene of a collapsed structure, time is short. Responders must locate and rescue survivors trapped in rubble, often with dust and haze obfuscating their line of sight. Currently, responders employ K9 units and manual search parties within these types of environments. This approach can be time-consuming and expose the search party to gases, chemicals, and grievous danger from further structural collapse.
DRΛGOON is a mobile ground vehicle that scouts interior spaces through teleoperation, localizes points of interest under poor visibility and relays a coherent representation of the vehicle’s environment and points of interest back to the user. Of particular interest is the detection and localization of humans in a debris field: A time-critical task often necessary in the wake of structural collapse or natural disasters. Relaying a consistent representation of the interior environment is critical to first responders for the planning and execution of rescue operations. Accomplishing these tasks with airborne particulate obfuscation, adverse lighting conditions and debris occlusion is critical to DRΛGOON’s success in relevant disaster scenarios.
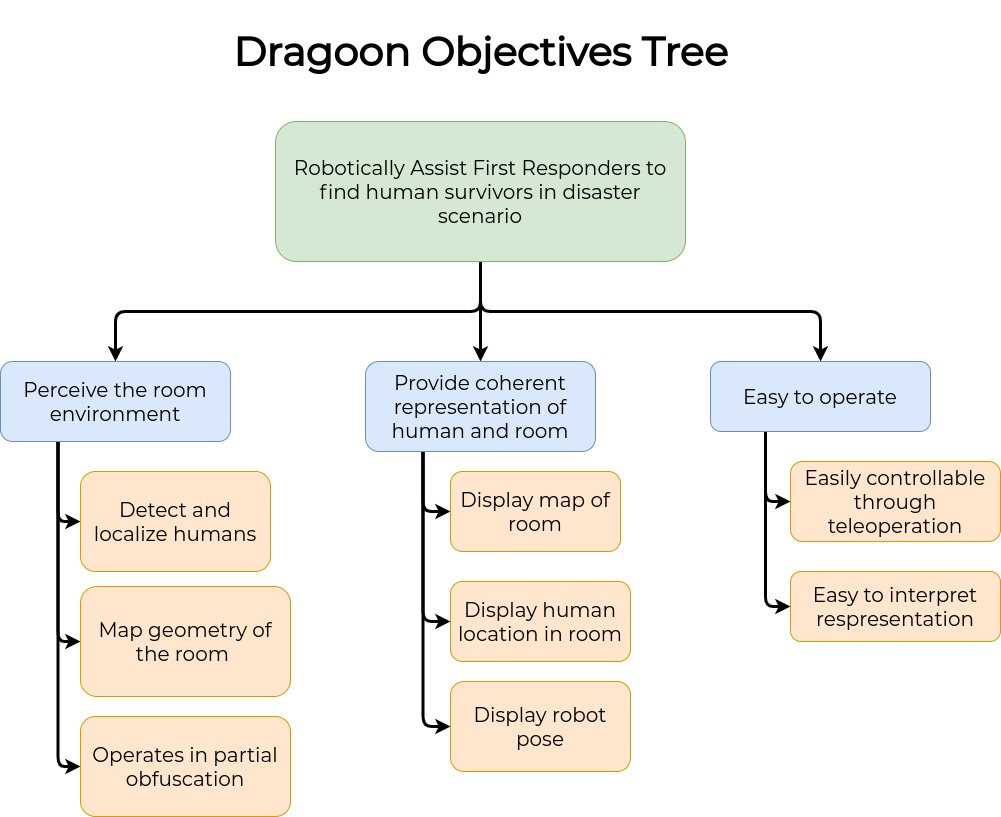
The high-level objectives of our system are shown in figure below. Our system aims to tackle several engineering challenges including developing a feasible human detection algorithm with low-cost sensors and maintaining detection capability in a dark and obfuscated room.
Use Case

First responders deploy DRΛGOON at ingress point of the partially collapsed building 
DRΛGOON surveys the interior of the building interior and searches for survivors
A 7.5 magnitude earthquake strikes downtown Los Angeles in the middle of the night. The entire city plunges into panic as buildings collapse with victims trapped inside. The recon team of the Urban Search & Rescue (US & R) California Task Force 2 (CA-TF2) arrives at the site of a partially collapsed office building. The building used to boast a wide entrance into its lobby, but the team is met with broken chunks of concrete that block all access paths. Recon team leader Capt. Gisel Montag faces a difficult situation; she could ask her team to start removing rubble from the entrance, but this will cost them precious time without any guarantee that they will find survivors.
The Captain pulls out a pelican case and quickly deploys the DRΛGOON disaster reconnaissance robot at an ingress point of the building. Within seconds of powering the robot on, she uses the remote teleoperation device to drive the robot deeper into the building. The screen in front of Capt. Gisel lights up and forms a clear picture of the geometry of the room inside, riddled with debris from the building collapse. Capt. Montag can tell from the display that DRΛGOON has about 18 minutes of battery life left, and that all subsystems are up and running. Armed with this knowledge, Montag proceeds to start the mission, confident that DRΛGOON will perform to its fullest extent. Capt. Montag controls DRΛGOON through a set of joysticks on a controller and steers the vehicle into voids between debris, using its sensor suite to scan for trapped survivors and identify hazards that rescue crews would face upon entry.
Capt. Montag pilots DRΛGOON through a field of collapsed steel beams, avoiding collisions by relying heavily on DRΛGOON’s real-time sensors to guide her control inputs. The visualizer displays the path DRΛGOON has taken through the field of beams, offering hints for the entry path of rescue crews during survivor extraction. Montag commands DRΛGOON around a corner and enters a room occluded by lingering smoke and dust. Montag is unable to make out any environmental features on the RGB camera port, but DRΛGOON is still able to map the room using its on-board haze and smoke sensor correction algorithms. Montag suddenly sees a hot spot on the infrared display port of her visualizer. Within a few seconds, DRΛGOON identifies this hot spot as a human trapped beneath a broken slab of concrete. DRΛGOON calculates the human’s location relative to the map that it has been generating. After localizing the human, DRΛGOON’s visual interface displays a marker at the human’s location. As the team ventures into the rubble to retrieve the survivor, they know to avoid a structural beam that fell in the path thanks to DRΛGOON’s on-board mapping software, which identifies obstacles using a combination of infrared and visual light sensors and draws their location on the map.
Capt. Montag felt relieved that her team had obtained situational awareness of hazards using DRΛGOON in order to execute a quick retrieval of the survivors. After the extraction operation, Capt. Montag and her team are able to review the mission logs from DRΛGOON in order to learn what they can and improving future performance.