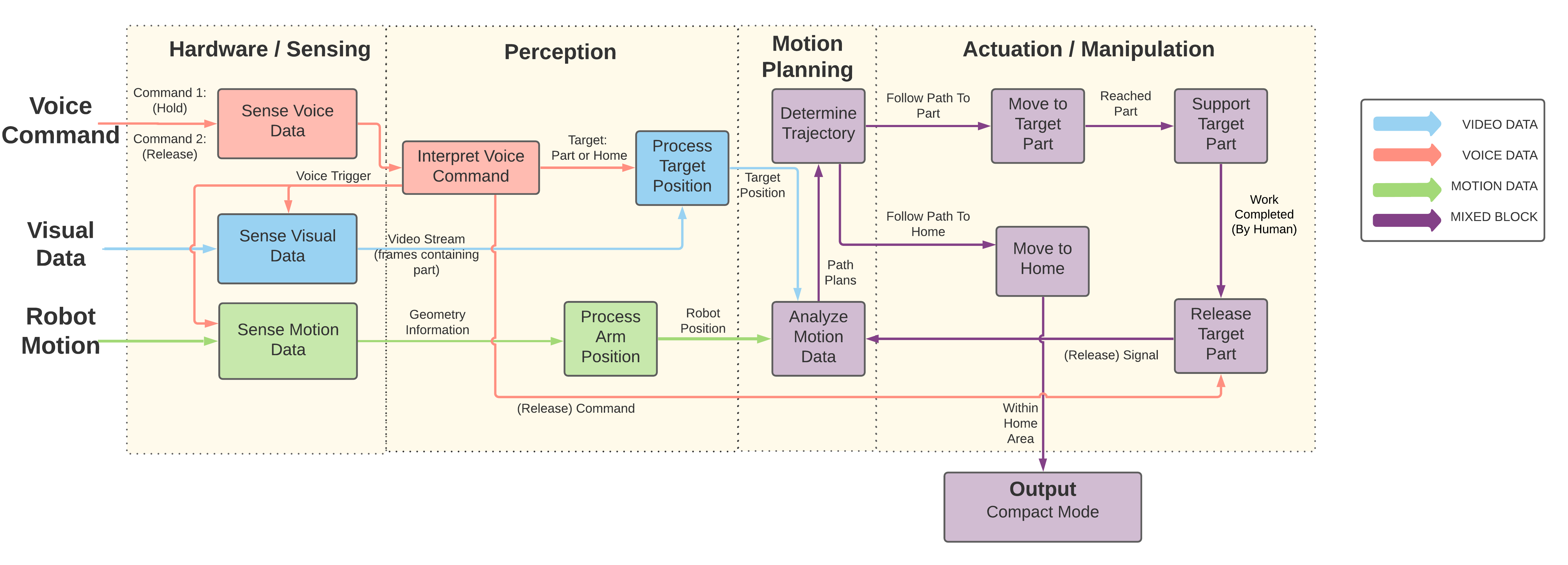
The Functional Architecture demonstrates the major functions of our system and the data flow between the subsystems. It contains three aspects: the input data, output mode, and the four major subsystems. The input data all come from the hardware sensors on the COBORG system. Our system will interpret the data and generate a manipulation output through the robot arm. The details for each subsystem are introduced in the following paragraphs.
Input
The system inputs are the sensor datas coming from the hardware on COBORG. More Specifically, out system takes three kinds of input data, i.e. Voice Data, Camera Data, Motion Data. Voice Data is the voice commands from users, such as ‘COBORG, hold this.’, ‘COBORG, release’. This kind of data comes from the microphone built in the COBORG backpack. For camera input, our system captures the visual information of the target object from the camera sensor on COBORG backpack. Motion data is the third type of inputs that our system will use to analyze the robot arm motion information, i.e. position, velocity, etc.
Main Functions
The Hardware and Sensing Subsystem is responsible for capturing the inputs. This subsystem will begin operation when voice commands come into the system. Based on the voice command trigger, other sensors will capture visual and motion data. The video stream and the geometry information will be fed into the Perception Subsystem.
The Target Perception Subsystem receives sensing data from the Sensing Subsystem. After the system interprets the voice command from the Sensing Subsystem, based on the voice command content, the system will detect the desired target (part, home) position and retrieve the robot arm motion data to execute Motion Planning.
The Motion Planning Subsystem will use the motion data and the target position information to determine the trajectory for the robot arm. The data will first come into the Analyze Motion Data block to generate possible path plans. The determined trajectory from multiple path plans will be forwarded to the Actuation and Manipulation Subsystem.
The Arm Actuation and Manipulation Subsystem receives the trajectory as the input, and by controlling the robot arm, COBORG will follow the trajectory, move to the desired object, and hold the object overhead.
Output
The outputs of our system is “Compact Mode”. After all of the main functions execute, the robot arm shall stabilize the target in place and then move back to the home position as the “Compact Mode” output in the end.