Use Case 1: Stabilize Parts, Compactify, and Hold Objects
Sally works on the assembly of airplane wings at Boeing. When she gets to work she checks her to-do list and sees that her list is topped with a series of tricky assemblies. Knowing that she will require aid shortly, she walks over to the COBORG backpack arm station and signs out one of the units. Picking the unit up from its charging station, she straps the backpack on, adjusting the straps for comfort, and heads over to the plane she will be working on today. After completing some remedial tasks she is ready to move onto the trickier cases where she will require the arm’s help. She switches on the backpack arm, which has been in a compact position and not using energy up until this point. Sally grabs the part she requires assistance with and holds it up over her head, fitting it into place (see Figure 1A). When the part is stabilized, she says, “COBORG, hold this,” and the COBORG backpack arm detects her hands in 3D space and moves the robot arm to a position where it can push on the part and stabilize it (see Figure 1B). Sally lowers one of her arms from the part, now that the COBORG backpack arm is holding it, and uses a drill with her free hand to screw the part into place (see Figure 1C). While Sally’s body shifts its position, the COBORG backpack arm adjusts to maintain the position of the end effector in 3D space, supporting the part regardless of Sally’s position within the limits of the arm, with 5 degrees of freedom. Now that the part is fastened, Sally says, “COBORG, return home.” The COBORG backpack arm returns to its compact position and goes into sleep mode, awaiting further instruction with minimal power usage. Sally finds the next part for the next task and uses the backpack arm to help her secure it as well. After completing a series of similar tasks, Sally comes to a panel she will have to connect located in a dark area of the interior. Sally quickly switches the end effector of the COBORG backpack arm from the support paddle to the gripper, handily attached to the side of the backpack. She then locks her flashlight into the gripper, moves the arm into place so that she can see the necessary location, and says, “COBORG, stay.” The COBORG robot arm maintains its position and orientation in 3D space while Sally moves around, reaching for the panel she can now see, and finishes her task. She then says, “COBORG, return home,” removes the flashlight from the gripper, and switches back to the support paddle for her next series of tasks. After completing all of her tricky tasks for the day, Sally returns the COBORG backpack arm to its charging station and signs it back in. While Sally completes the rest of her work for the day, the COBORG backpack arm charges, awaiting its next user.

Figure 1A. User holds part 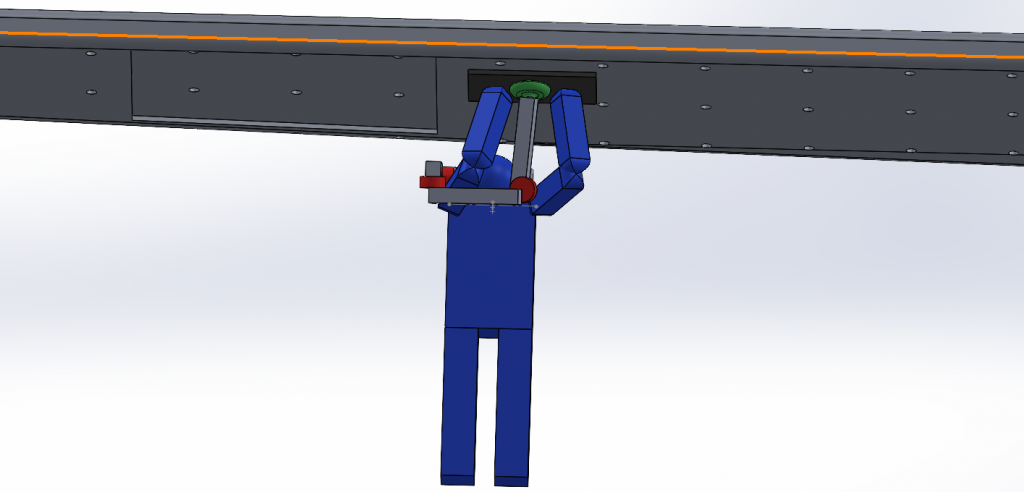
Figure 1B. Combined Support 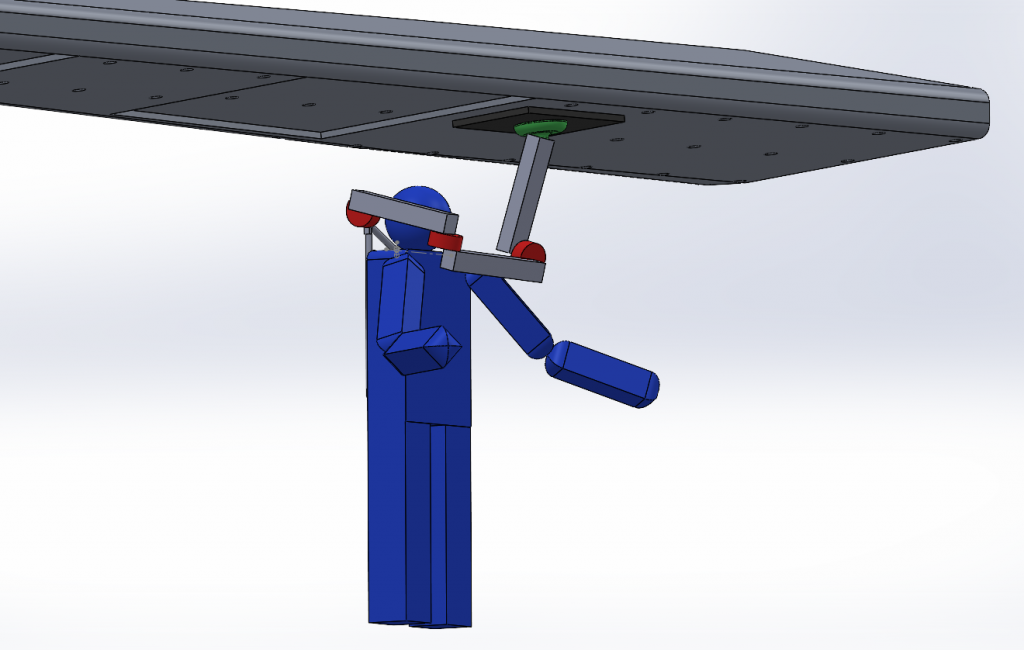
Figure 1C. COBORG Hands-free Support
Use Case 2: Safety Scenario
While using a Cyborg backpack arm, Sally accidentally gets a finger stuck between the part and the surface. Sally yells, “Stop!,” repeatedly causing the Cyborg backpack arm to release the torque of its motors, resulting in the arm slowly drifting downward. Once Sally has checked her fingers for injuries and brought the situation back to normal, she presses and releases the e-stop button to return the Cyborg arm back to functionality and continues on with her tasks.