The architecture for the Data Acquisition Subsystem looks like the following,

![]()
Currently, our sensor rig houses a monocular Point Grey camera and a TI mmWave RADAR. Data from these sensors is fed into the Vehicle and Environment Detection subsystem.

In order to validate and test our algorithms, we use an open source autonomous driving simulator – Carla
The architecture for our simulator subsystem looks like the following,
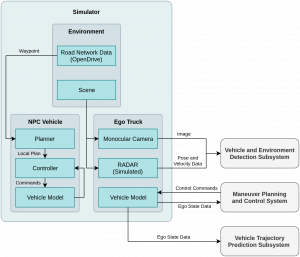
![]()
The simulator environment is where we create a collision scenario coupled with our use case map which we develop in VECTORZERO: RoadRunner


A town in Carla Map built in RoadRunner
Carla also has a Python API through which we develop scripts to interact with Carla environment. Moreover, there is also a ROS bridge that allows us to publish and subscribe to various ROS nodes.
Carla, as of yet, does not contain a RADAR sensor hence we simulate one by extracting the ground truth of all vehicles that would be detected by our RADAR and then add some noise on top of it.
For more information about this subsystem, see our subsystems description.