Spring Semester Status Updates
PR11 Presenter: Rick Shanor — 03/30/16
1) Run full 12 bin picking test in 15 minutes
2) Present testing results on 5 random shelf configurations
PR10 Presenter: Abhishek Bhatia — 03/16/16
1) Redo Kinect calibration to improve the deviation of the full system
2) Integrate the SBPL arm planner
3) Add the ability to precompute trajectories and replay them at runtime
4) Finish the turntable to autonomously collect and segment images
5) Train Segmentation and Identification CNNs
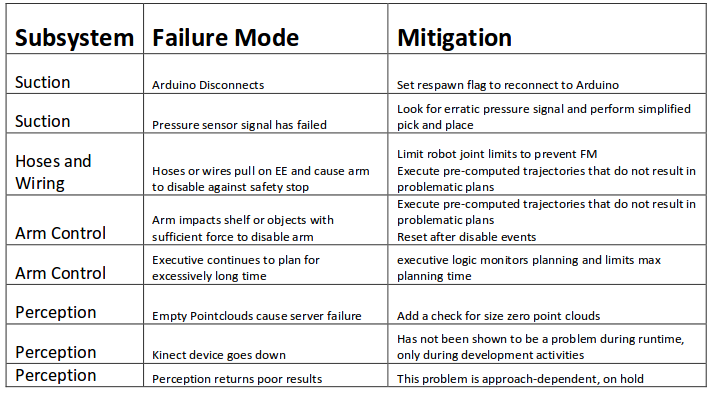
6) Conduct Failure-mode effects analysis of each subsystem to improve
robustness
PR9 Presenter: Lekha Mohan — 02/24/16
1) Demonstrate UR5 accessing the APC configuration space autonomously (Feroze and Alex)
2) Evaluate deviation in localization with the integrated system – Kinect, UR5 and shelf (Rick)
3) Develop grasping model for 5 items (Lekha)
4) Run Perch with last year’s APC items (Rick)
5) Model one item from the 2015 APC database using SimTrack (Feroze)
6) Perform Kinect kinematic calibration (Alex and Abhishek)
PR8 Presenter: Feroze Naina — 02/10/16
1) Identify localization of shelf using the Kinectv2
2) Display CAD models for new suction gripper, Kinectv2 mount, and UR5 base
3) Display new suction gripper prototype
4) Demonstrate ability to add objects to collision planner from our SMACH framework
5) Rerun FVE demonstration using UR5 platform in simulation
– Migrate system from PR2, ROS Groovy, and Ubuntu 10.04 to UR5, ROS Indigo, and Ubuntu 14.04
– Create custom URDF to include suction end effector and Kinectv2 in motion planning
– Demonstrate ability to read Amazon’s provided JSON work order
2) Display CAD models for new suction gripper, Kinectv2 mount, and UR5 base
3) Display new suction gripper prototype
4) Demonstrate ability to add objects to collision planner from our SMACH framework
5) Rerun FVE demonstration using UR5 platform in simulation
– Migrate system from PR2, ROS Groovy, and Ubuntu 10.04 to UR5, ROS Indigo, and Ubuntu 14.04
– Create custom URDF to include suction end effector and Kinectv2 in motion planning
– Demonstrate ability to read Amazon’s provided JSON work order
PR7 Presenter: Alex Brinkman — 01/27/16
Review progress from Winter break
– Migration from PR2 to UR5
– Integration of perception pipeline into ROS Framework
– End effector redesign
– Integration demonstration
Fall Semester Status Updates
Goal for Week of 11/16/15:
Presenter: Rick Shanor
Suction
- Final PCB and enclosure.
- Create test circuit with components and build final hardware.
Perception
- Procure computer for Kinect2.
- Run algorithms directly grabbing real-time data from Kinect-2.
Platform
- Use moveit_pr2 to avoid collisions.
- Demonstrate a simulation that can move the arms to an item, move base and move the arm to order bin.
Goal for Week of 11/09/15:
Presenter: Abhishek Bhatia
Suction
- Final PCB and enclosure
- Create test circuit with components and build final hardware
Perception
- Integrate filtering, clustering, and pose estimation algorithms in one linux bash
- Run large-scale 1000 image test to baseline algorithm performance
- Procure computer for Kinect2
Platform
- Use moveit_pr2 to avoid collisions, add custom gripper in simulation.
- Demonstrate a simulation that can move the arms to an item, avoid an obstacle, move and move the arm to order bin.
Goal for Week of 11/2/15:
Suction
- Find impeller system for final build (Rick)
- Iterate upon prototype suction gripper with focus on build quality (Alex)
- Design of Electronics for suction Gripper (Feroze, Abhishek)
Perception
- Design algorithm to filter out shelf from depth data (Lekha)
- Incorporate shelf content knowledge into color based clustering (Rick)
Platform
- Command the arm inside the state controller (Feroze)
- Move actual PR2 arm using Inverse Kinematics action (Feroze)
- Programmatically command the base to move in simulation (Abhishek)
- Implement tf transform tree on Kinect2 (Alex)
Goals for Week of 10/26/15:
Presenter: Lekha Mohan
Large scale 3D recognition test (Lekha)
- Extract point cloud from Kinect2 and use within ROS (Feroze)
- Compare feature recognition algorithms (Lekha)
Refine gripper design (Rick)
- Build shopvac based gripper arm that can be held by PR2’s fingers (Rick)
- Run teleop PR2 test to verify object acquisition on at least 7 items from the 2015 APC dictionary (Abhishek)
PR2 simulation (Feroze)
- Get arm to move from one point to another (Feroze)
- Establish SMACH controller (Alex)
Goals for Week of 10/19/15:
Presenter: Feroze Naina
- Create SW Specification: Alex
- Work Breakdown and Milestone Schedule: All
- Previous Game strategy and PR2 performance analysis: Bhatia, Lekha
- Preliminary Suction Design: Rick and Alex
- Image Feature Matching Demo: Rick, Lekha, Feroze
- Begin ROS Skeleton code: Alex, Feroze, Bhatia