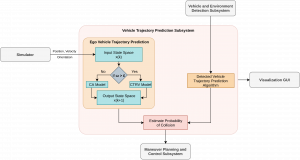
The architecture for the Vehicle Trajectory Prediction Subsystem looks like the following,
![]()
The Vehicle Trajectory Prediction subsystem is critical to deciding the dynamical response to be generated by the ego-vehicle. Currently where this system stands is it predicts trajectory for the ego-vehicle three seconds into the future for use cases that mimic situations this project aims to solve. Long Short-Term Memory (LSTM) neural networks, which are a particular implementation of recurrent neural networks will be employed to solve the oncoming vehicle trajectory
prediction problem. The ego-vehicle trajectory module of the Vehicle Trajectory Prediction subsystem, in a nutshell, simply forward propagates the current state space of the ego-vehicle three seconds into the future. It extracts state data such as position, orientation and velocity which constitutes our input state space. Depending on the angular velocity of the vehicle, the module chooses between two motion models. If the angular velocity is less than a certain threshold it chooses a constant acceleration (CA) model which assumes that the vehicle is moving in a rectilinear with a constant acceleration. If the angular velocity is above a certain threshold it chooses a constant turn rate velocity (CTRV) model which assumes the vehicle is moving with a constant speed and constant yaw rate, i.e, the
vehicle is moving on constant radius road.

Rviz Visualization, Green is the predicted trajectory and blue is GT
For more information about this subsystem, see our subsystems description.