

NASA has been planning to extend human inhabitation to Earth’s nearest heavenly body, Moon. In order to set up the first interplanetary colony, they want to search for caves on the Moon that can protect human and their colonies from the radiations and extreme temperatures. Recent satellite imagery show that Lunar pits might be an entry point for such caves.
Astrobotic, wants to send an army of rovers for their customer, NASA, to get images of the inside of the lunar pit. Astrobotic approaches team H#SH Robotics, who have been working on a similar setup for their project on “Co-robotic exploration of moon and modelling of pits”.
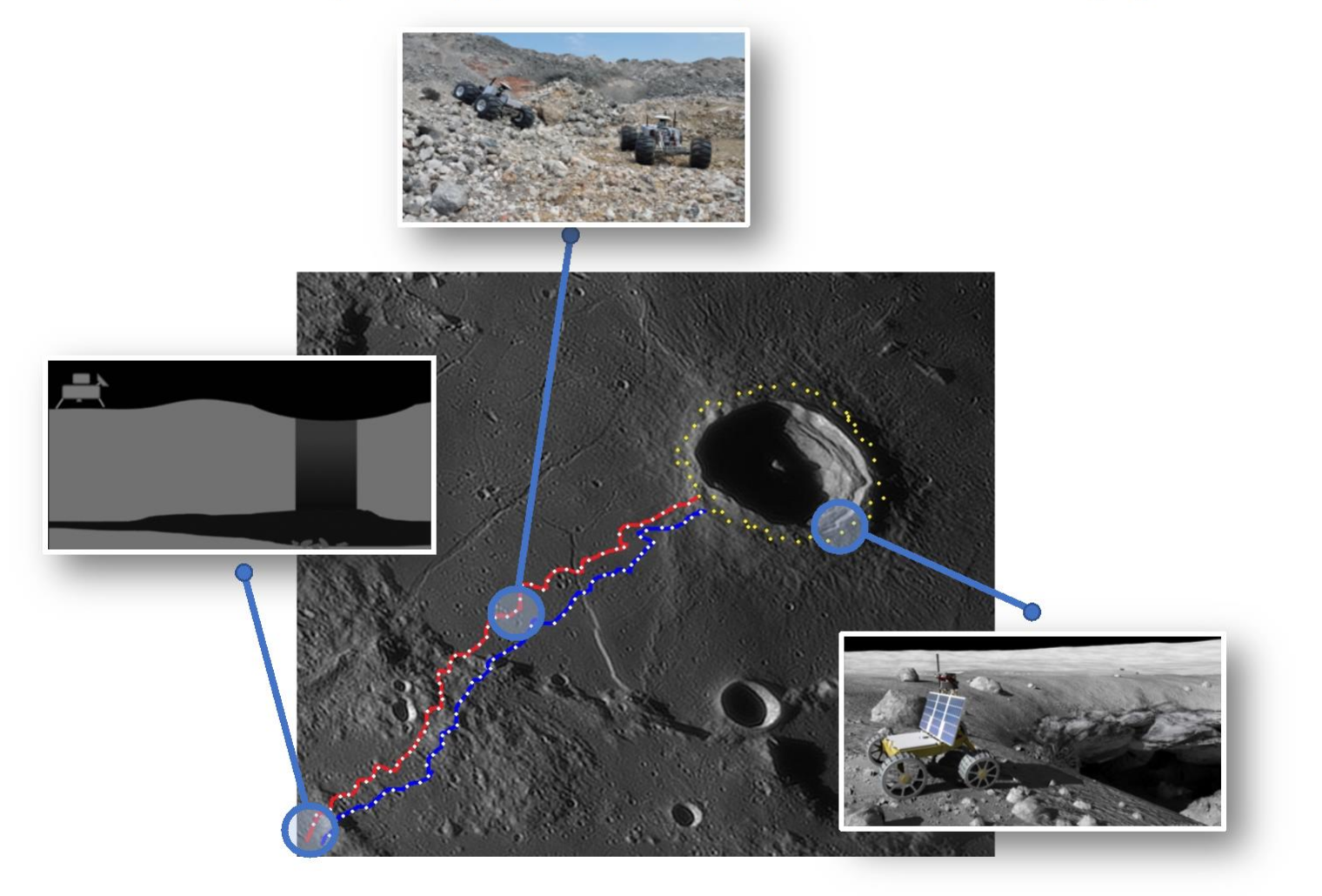
Figure 1: Use case. The red and blue lines describe the path traversed by the rover. Yellow dots describe the points at which the rovers capture images of the Pit and the white dots are the points where the rovers detect each other and estimate their global position.
On Dec 15, 2020, Astrobotic launches their lander which successfully lands on the Moon and deploys a fleet of the first autonomous rovers on Moon. The rovers start moving in pairs towards Lacus Mortis (a Lunar pit), from the landing location. Rover 1 and Rover 2 start traversing the uneven terrain of the moon. On their way, they find various features on moon like pebbles as small as marbles, rocks as huge as grown-up elephants, flat lands, slopes of high gradients, ditches, pits and craters.
The base station on the Earth had loaded the global path on both robots to avoid the difficult paths and traverse the easier ones, which has the lowest number of steep slopes and obstacles compared to any other path. As the rovers are moving in a GPS denied environment, they keep detecting each other from time to time as to calibrate their global positions. They re-plan the path after recalibrating their position and keep moving towards the pit. During the entire journey the on-board computer ensures that the rovers do not get into a situation where they cannot communicate or detect each other.
As soon as the rovers reach Lacus Mortis, our desired pit, they move along the circumference of the pit. They find that the pit is not well lit along some of the walls and thus, they plan a path around the pit so that they can see the well-lit portion of the pit walls. They try to be close enough to the edge of the pit so that they can take pictures of the inside of the pit, yet far enough so that they do not fall inside the pit. The rovers continue to circumnavigate around the pit, clicking pictures of the same. They keep on taking multiple images at each position and storing them.
Once the rovers complete their journey around the pit, they send the pictures to satellite and this way NASA receives the images. NASA feeds the data into the algorithm made by H#SH robotics to get a three dimensional model of the pit. The scientists at NASA are astonished to see that, what looked like a pit from the satellite images is an entrance to a huge cave/tunnel that is might be a potential location for man’s very first extra-terrestrial colony.