The team first developed use cases to help describe how the system will achieve its goal and define the purpose of the project. An organized collection of scenarios was created by tracing backward from the sponsor’s needs. This further defined the requirements and scope of the project.
Since the customer desired a fully functionally system that could eventually scale to civilian aircraft, some of the use cases include full-sized, fixed-winged aircraft scenarios. This is shown in Use Case 1 and 2. The project can also be used on a drone to help pilots operating BVLOS aircraft avoid objects; this is shown in Use Case 3 and 4.
Use Case 1:
Steve owns a Cessna 172 and likes to fly on small hops from town to town. On some of his journeys, the airfields he lands at are not manned on the weekends and there is no ground support to look out for air traffic in the local area. One day Steve tries landing at one of these unmanned airfields. To make sure the area is clear, he turns on the AACAS system that helps detect air traffic around his plane. The system detects another aircraft in the distance that is travelling near the airport that is not using a TCAS system. AACAS sends an alert to Steve and gives him directions to avoid the aircraft. Steve corrects his trajectory and lands safely. This specific use case is shown in Fig. 1 below.
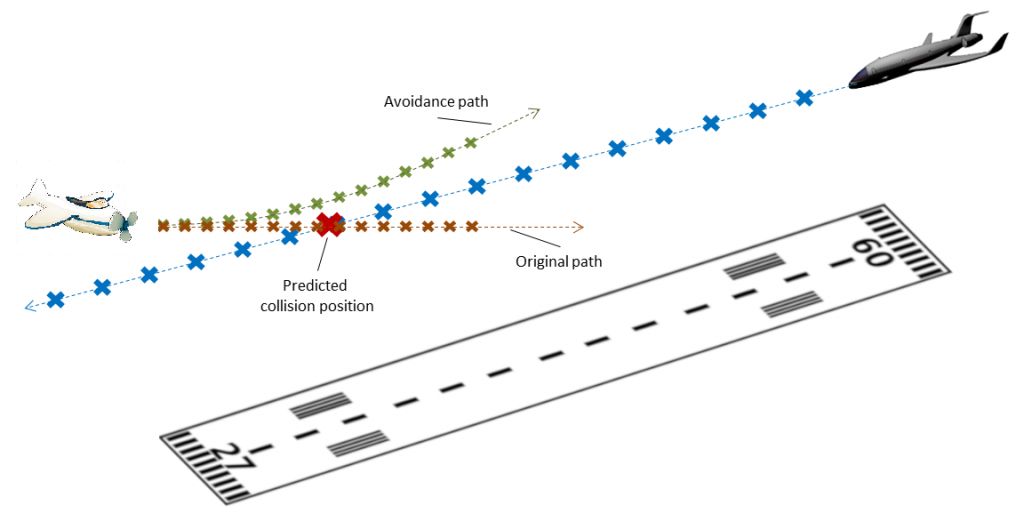
Fig. 1: AACAS scenario depicting traffic at an unmonitored airport.
Use Case 2:
Steve is a passenger on an autonomous air taxi that is flying among skyscrapers in a highly populated urban area. A drone appears and the AACAS predicts that the air taxi will collide with the drone. Air taxi receives a new path from the AACAS that avoids the drone and the surrounding skyscrapers. Executing evasive maneuvers, the air taxi continues transporting Steve to his destination.
Use Case 3:
Steve is a cameraman for the local high school football team. He buys a drone to film the game. To film the game, Steve pilots the drone to an altitude above the players and manually controls the drone’s location and camera angle. Suddenly, the quarterback throws the ball in a trajectory that may hit the camera drone. AACAS detects the incoming ball and predicts its flight path. Using this incoming flight path, AACAS plans a safe path to avoid the ball. The system overrides Francois’s piloting control and takes evasive action.
Use Case 4:
Angela is piloting an aerial drone to send an object to her friend Albert who is located in another building. Between the buildings are some electricity wires that AACAS detects and takes control of the drone to avoid the wires. Further down the street, a group of people playing sports throw a ball high in the air. AACAS determines the ball will not collide with the drone and does not modify the drones current path.