During FVD, the team demonstrated and validated that the system was able to detect static and moving obstacles reliably, plan a path around the obstacles, and visually guide the pilot to follow the planned paths. This was done using two sets of demonstrations.
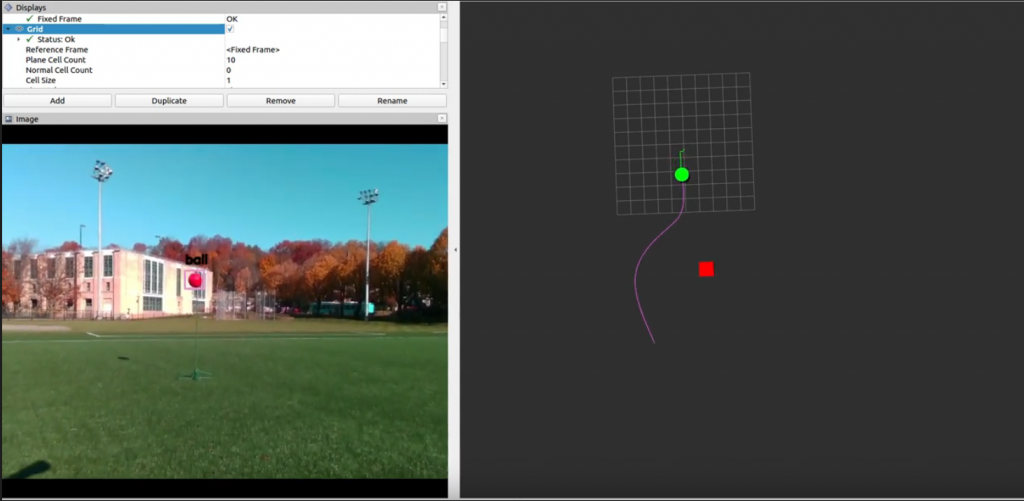
In the first demonstration, The team set up three static obstacles (red balls) on the soccer field with the waypoints on either side of the obstacles so that the drone must maneuver between the objects to reach the next waypoint. The pilot took off the drone and flew towards the waypoint following the initial flight path. As the obstacles came into the 10 meter detection radius, the detected obstacles as well as the updated flight path appeared on the user interface. The pilot was then able to follow the fly path and navigate through the obstacle course successfully using only the user interface. However, due to caution and safety concerns, during this demonstration, the pilot occasionally looked at the drone to make sure it’s not too close to the team members or the obstacles. This test was completed with different object locations and number of obstacles multiple times. This validated the performance of the detection, planning system as well as the effectiveness of the UI system. Figure 21 shows the detected obstacle as well as the recommended path (pink line) being displayed for detection of a single object.
The latter demonstration was to showcase the ability to detect and track moving obstacles. One team member walked in front of the drone with the obstacle to act as a moving object. The system detected the future path the team member was likely to follow and planned a route to avoid the object and its future path. The team observed on the UI that the position of the detected obstacle as well as the recommended path by the planner were updating as expected. The drone successfully completed the moving obstacle test.