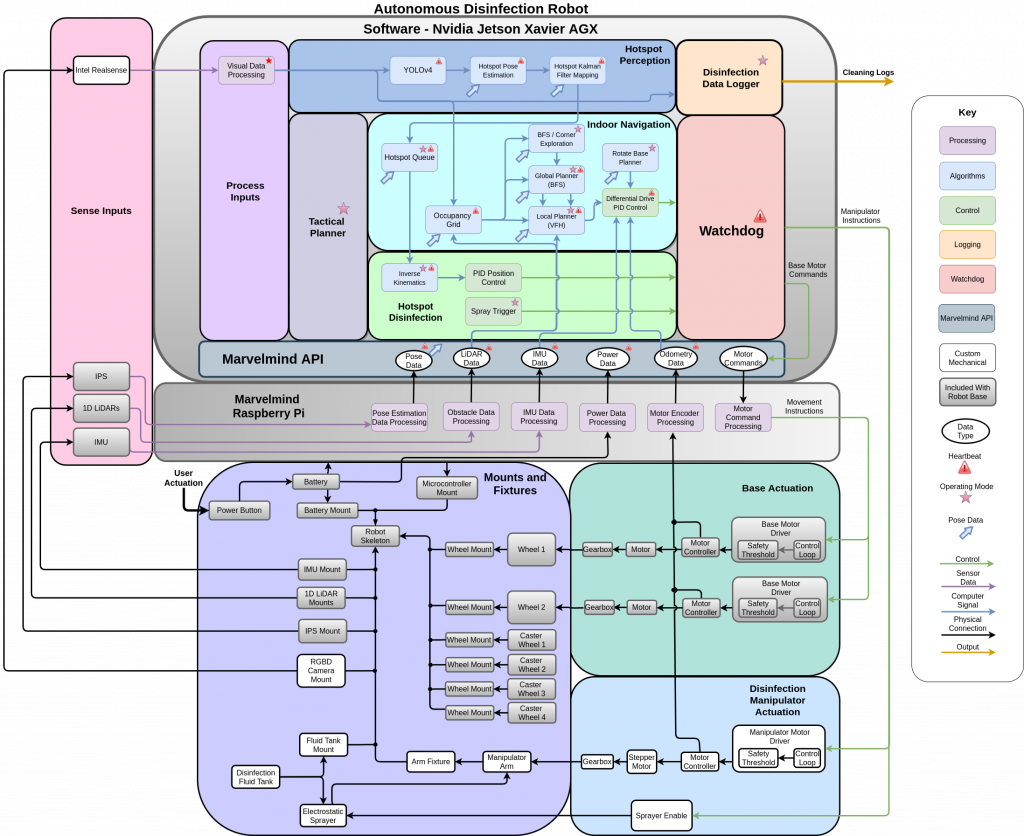
The cyberphysical architecture shows the major hardware and software components and the flow of information, energy, and material in the autonomous disinfection robot system. The cyberphysical architecture is broken up into five main blocks: sense inputs, software, base actuation, disinfection manipulator actuation, and mounts and fixtures.
Sense Inputs: The sense block contains all of the sensors that will be used in the system. These include an Intel Realsense camera, the Marvelmind IPS, 12 1D LiDARs, and an IMU.
Software: The software block encompasses the eight functional blocks from the functional architecture. This block will process sensor data, detect hotspots, estimate hotspot poses, navigate the environment, disinfect, log disinfection data, and monitor errors. All processing will be done on the NVIDIA Jetson Xavier AGX.
Base Actuation: The base actuation block contains the low-level motor controllers for the base. This block will take torque commands as input and actuate the torques on each of the motors.
Disinfection Manipulator Actuation: The disinfection manipulator actuation block contains the low-level motor controller for the manipulator. This block will take torque commands as input and actuate the torques on the motor.
Mounts and Fixtures: The mounts and fixtures block contains all mechanical aspects of the system, including the robot skeleton, all of the sensor mounts, the wheels, the battery, the manipulator, and the electrostatic sprayer.