During Spring 2021, the team focused on both the hardware and software elements on the system.
Beginning with hardware updates, the manipulator was designed, fabricated and constructed and the base was updated to fit our requirements. The manipulator was attached to the base.


The spring semester also had a strong focus on designing, writing and testing the software components of Salus. The detection, estimation, and navigation subsystem were designed and implemented. Detection and estimation were integrated and run on the Jetson. The navigation system was developed in the Gazebo simulation environment and integrated with the manipulator using a tactical planner.

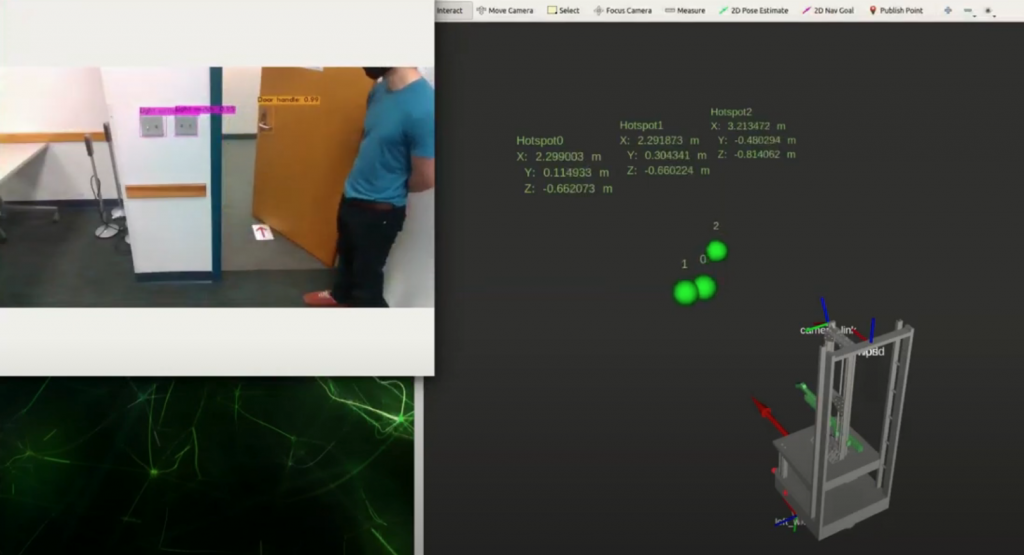
The full integration of estimation and detection can be seen here
The full integration in simulation of manipulation and navigation can be seen here
A video displaying the work shown at SVD encore can be viewed here