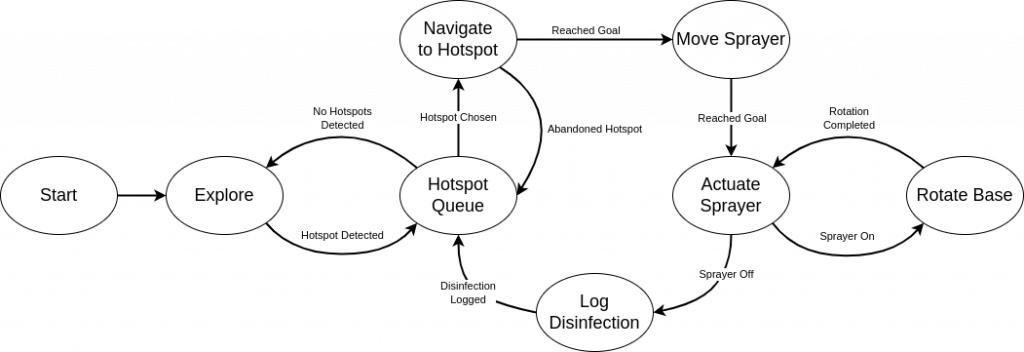
The tactical planner is responsible for keeping track of the operating state that Salus is in at any given time. This was achieved by building a finite state machine, as shown in the figure below. Each operating mode (i.e. state in the state machine) is performed by one of the subsystems. The Tactical Planner ROS node is set up as a server that performs state transitions. The subsystems are responsible for requesting a transition to the next state whenever the transition criteria are met.