Skip to content
Project Salus
Autonomous Disinfecting Robot
Home
About Us
Design
Use Case
System Requirements
Functional Architecture
Cyberphysical Architecture
System Design Description and Depictions
Implementation
Full System
Hotspot Detection
Hotspot Pose Estimation
Indoor Navigation
Manipulator-Sprayer Mechanism
Marvelmind v100 Robot Base
Tactical Planner
Disinfection Logging
Watchdog – Error Checking
Performance
Spring Validation Demonstration
Fall Validation Demonstration
Strong/Weak Points
Project Management
Work Breakdown Structure
Schedule
Risk Management
Parts List
Issues Log
Test Plan
Documentation
Presentations and Reports
Independent Lab Reports
Progress Reviews
Power Monitoring PCB
Design Brainstorming
Drawings, Schematics, and Datasheets
Software
Component Testing and Experiment Results
Media
All Photos
Fall 2020 Media Update
Spring 2021 Media Update
Fall 2021 Media Update
Public Presentation
Videos
Project Salus
Autonomous Disinfecting Robot
Navigation Menu
Navigation Menu
Home
About Us
Design
Use Case
System Requirements
Functional Architecture
Cyberphysical Architecture
System Design Description and Depictions
Implementation
Full System
Hotspot Detection
Hotspot Pose Estimation
Indoor Navigation
Manipulator-Sprayer Mechanism
Marvelmind v100 Robot Base
Tactical Planner
Disinfection Logging
Watchdog – Error Checking
Performance
Spring Validation Demonstration
Fall Validation Demonstration
Strong/Weak Points
Project Management
Work Breakdown Structure
Schedule
Risk Management
Parts List
Issues Log
Test Plan
Documentation
Presentations and Reports
Independent Lab Reports
Progress Reviews
Power Monitoring PCB
Design Brainstorming
Drawings, Schematics, and Datasheets
Software
Component Testing and Experiment Results
Media
All Photos
Fall 2020 Media Update
Spring 2021 Media Update
Fall 2021 Media Update
Public Presentation
Videos
Drawings, Schematics, and Datasheets
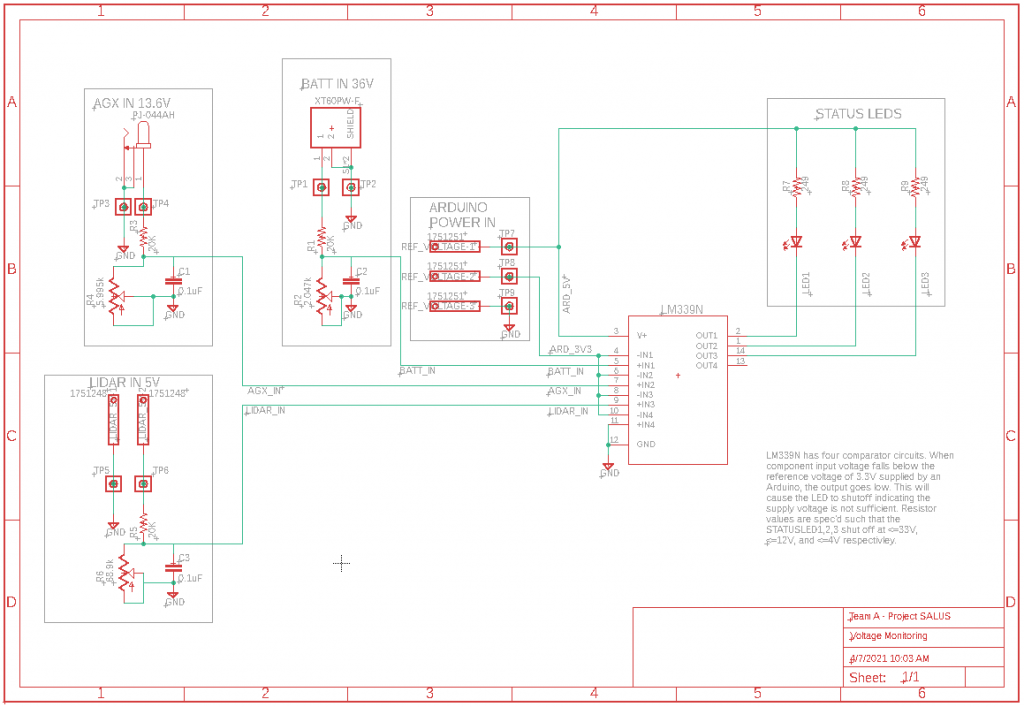
PCB PDS Schematic
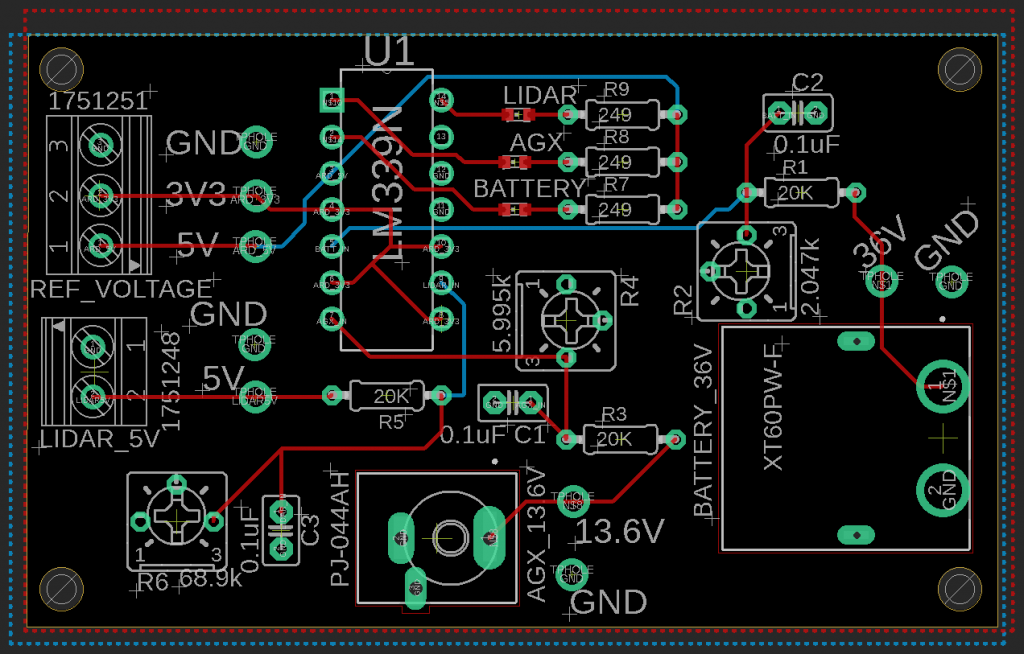
PCB PDS Board Layout
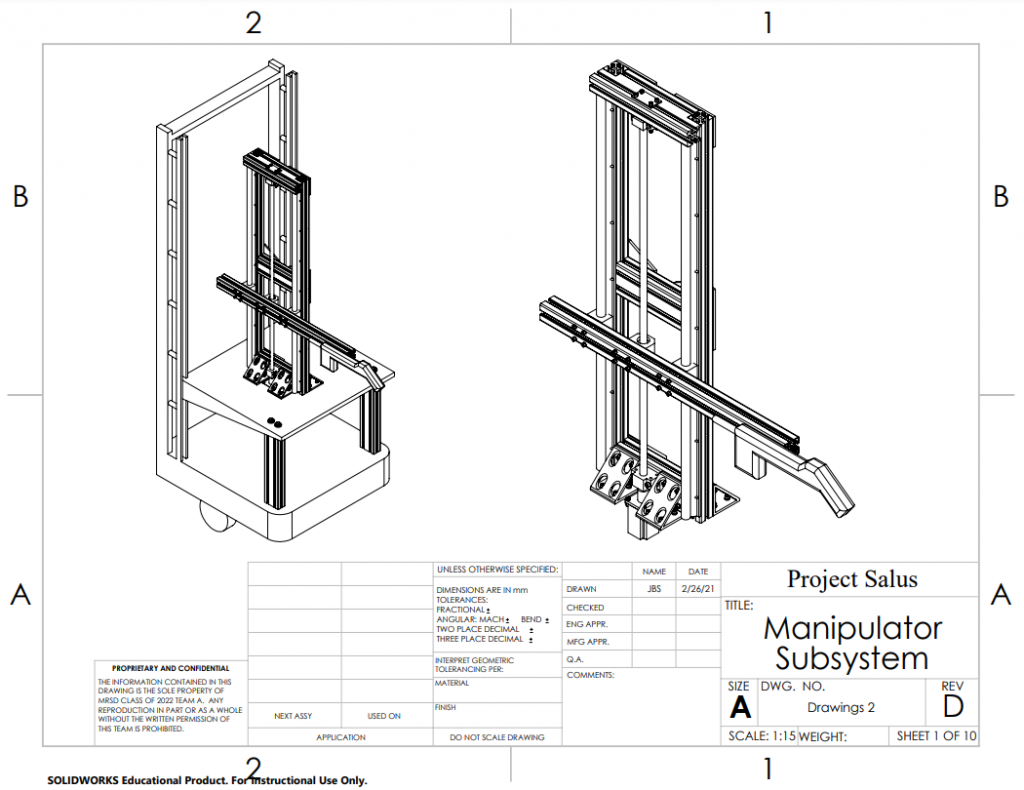
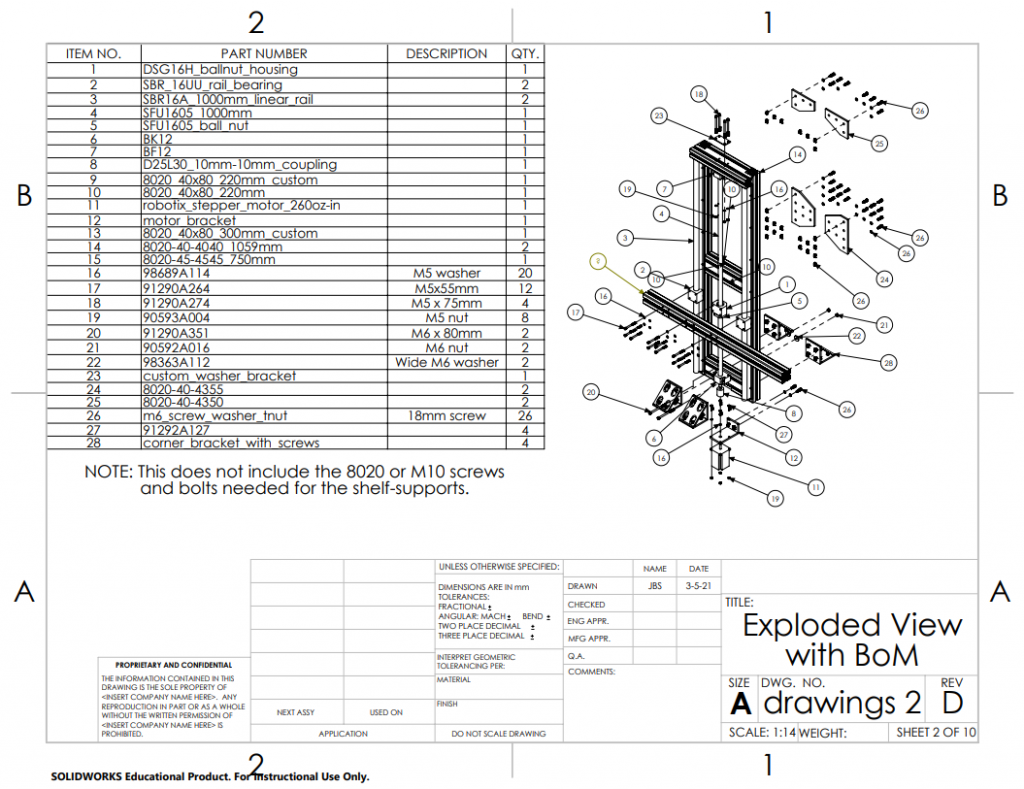
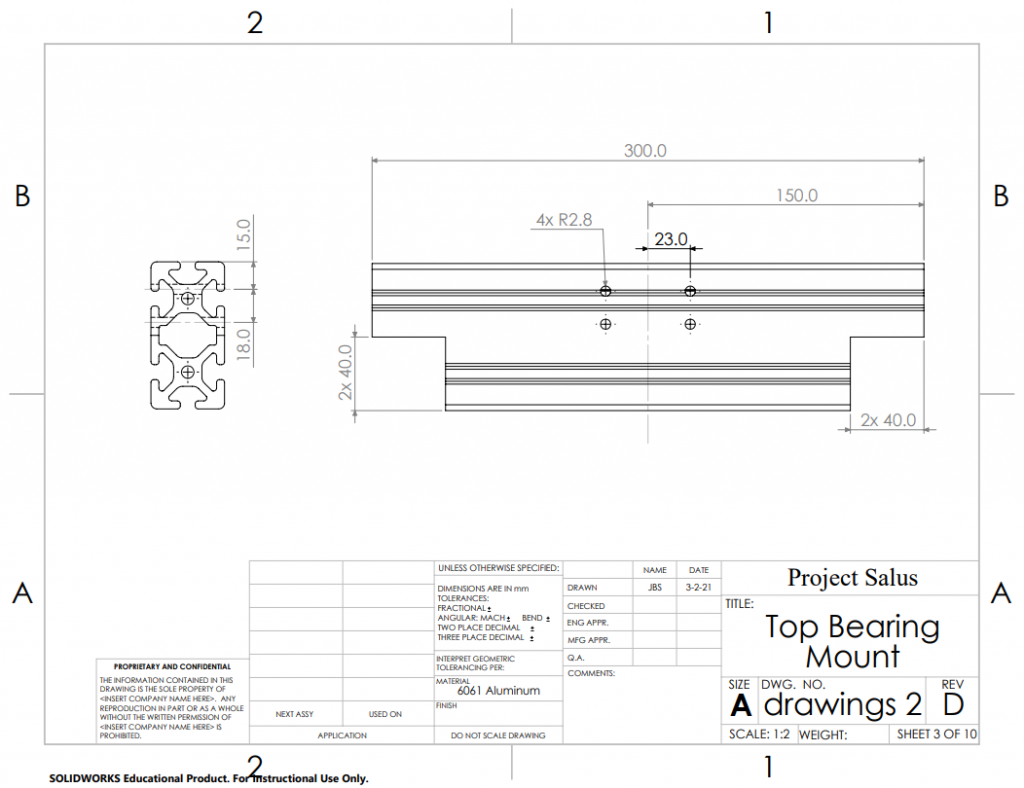
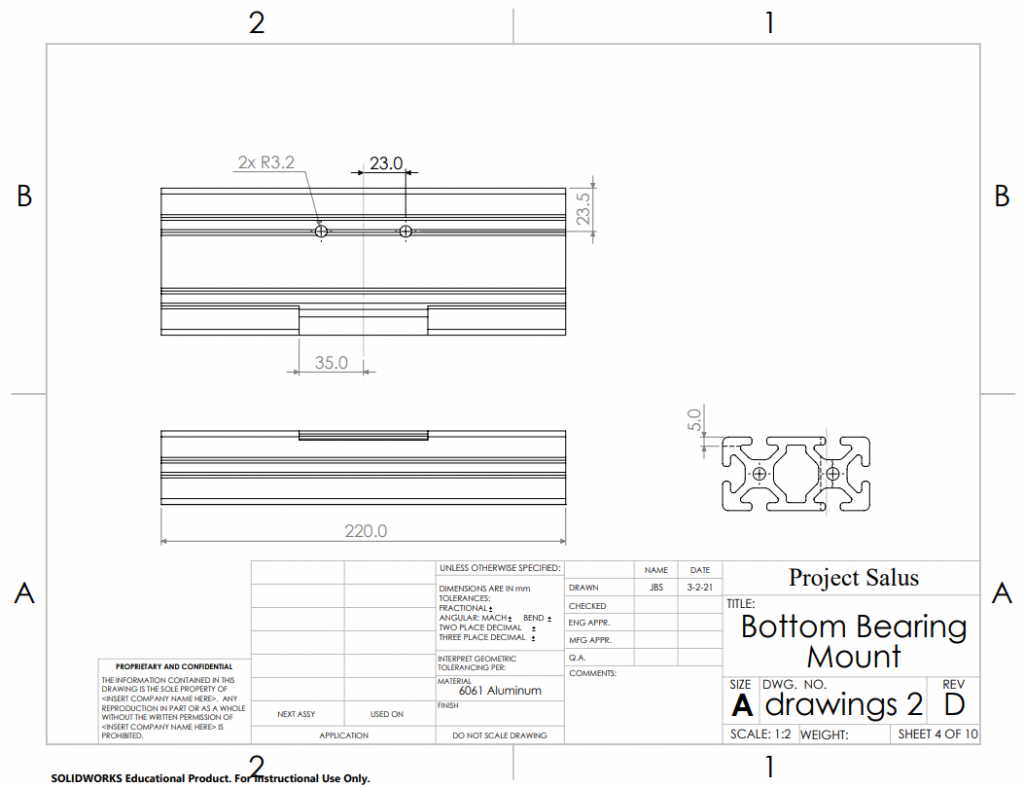
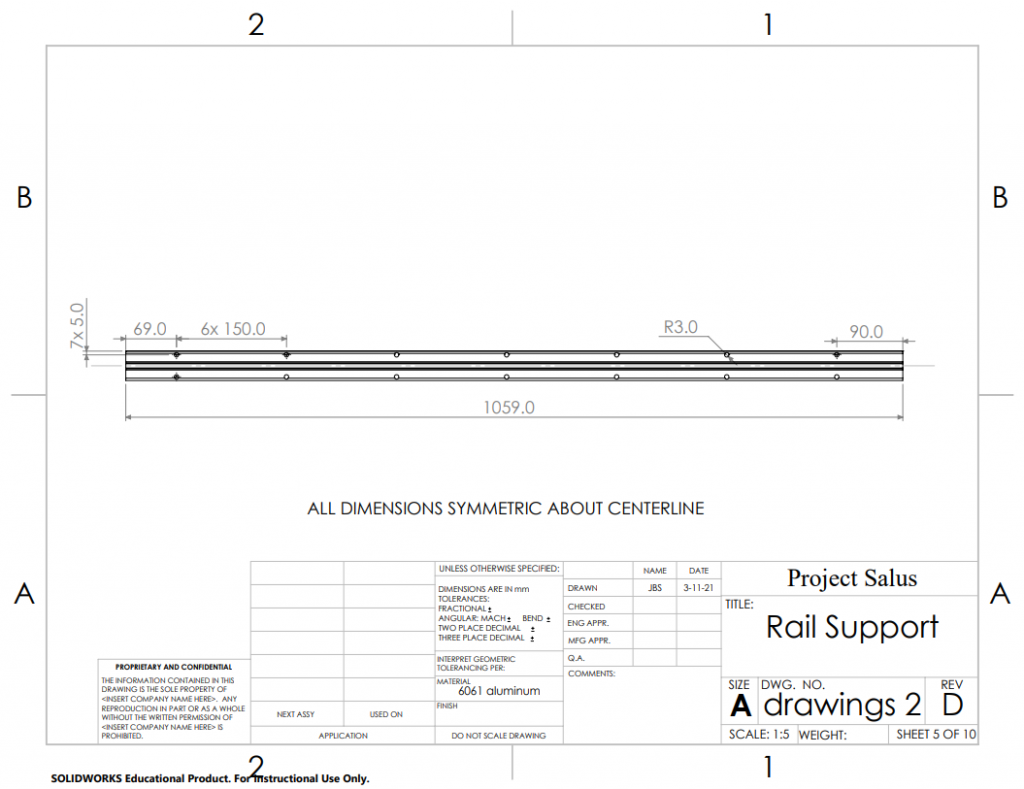
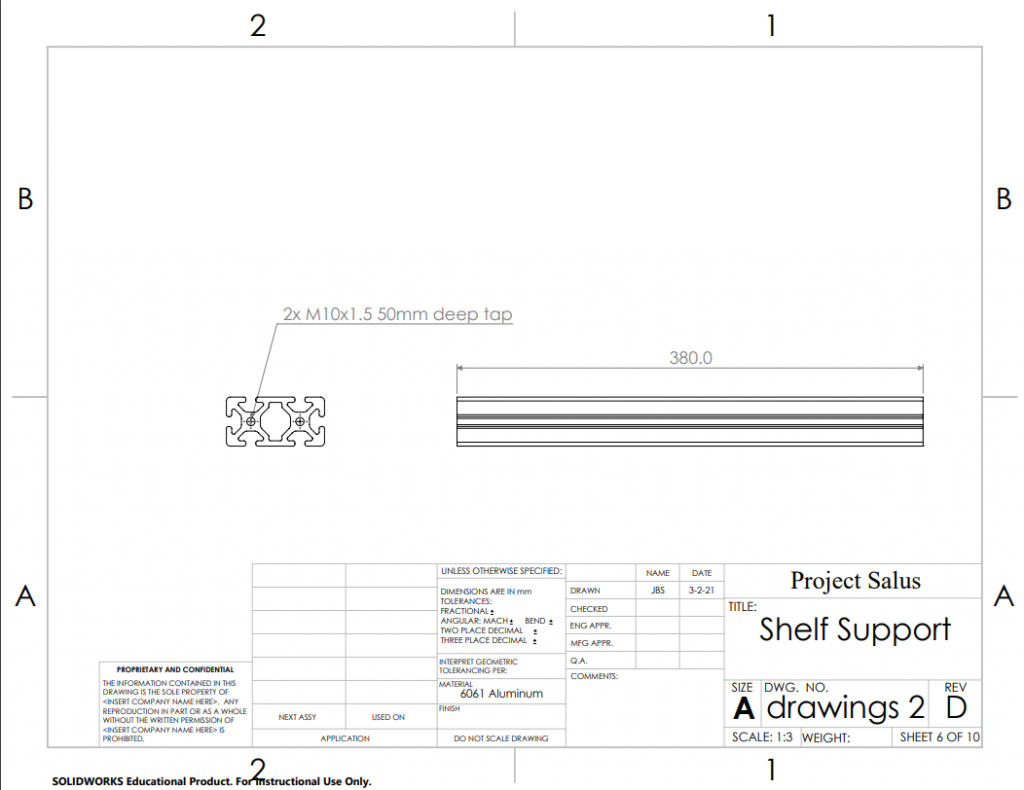
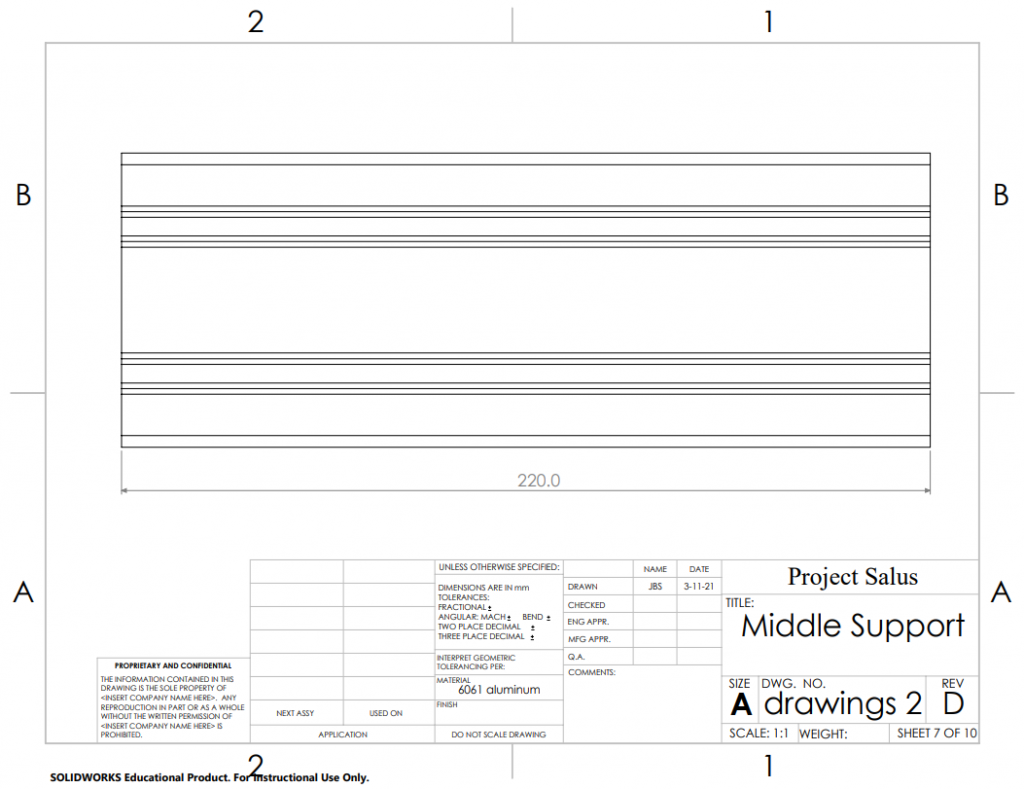
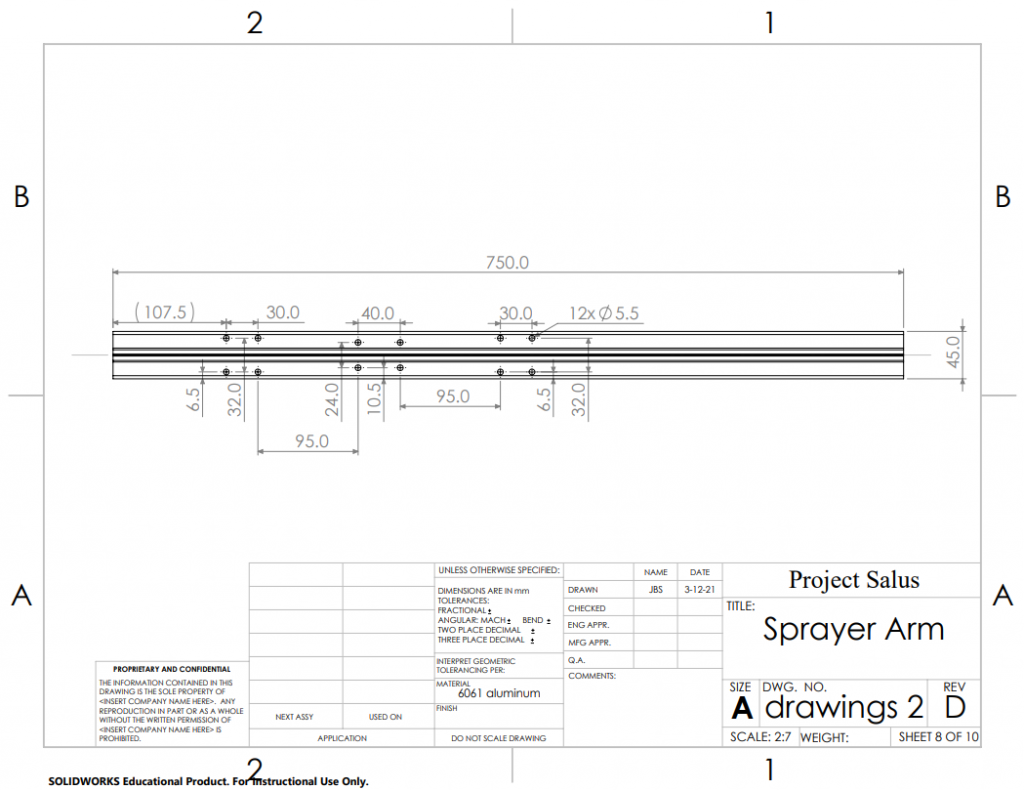
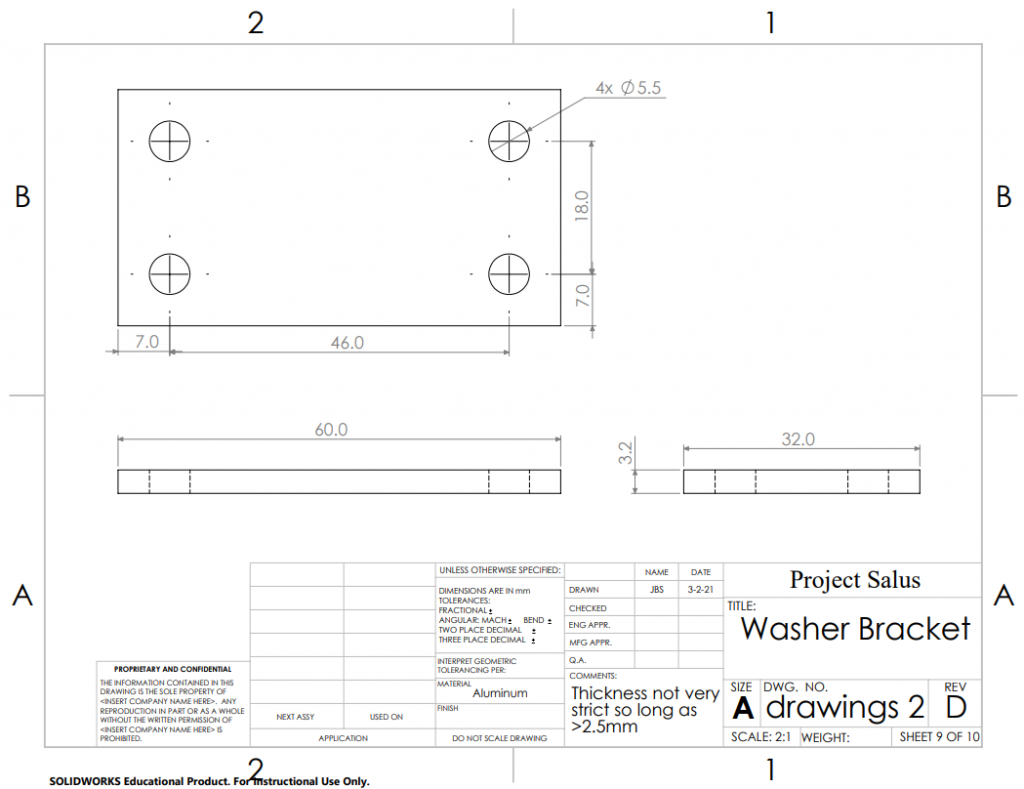
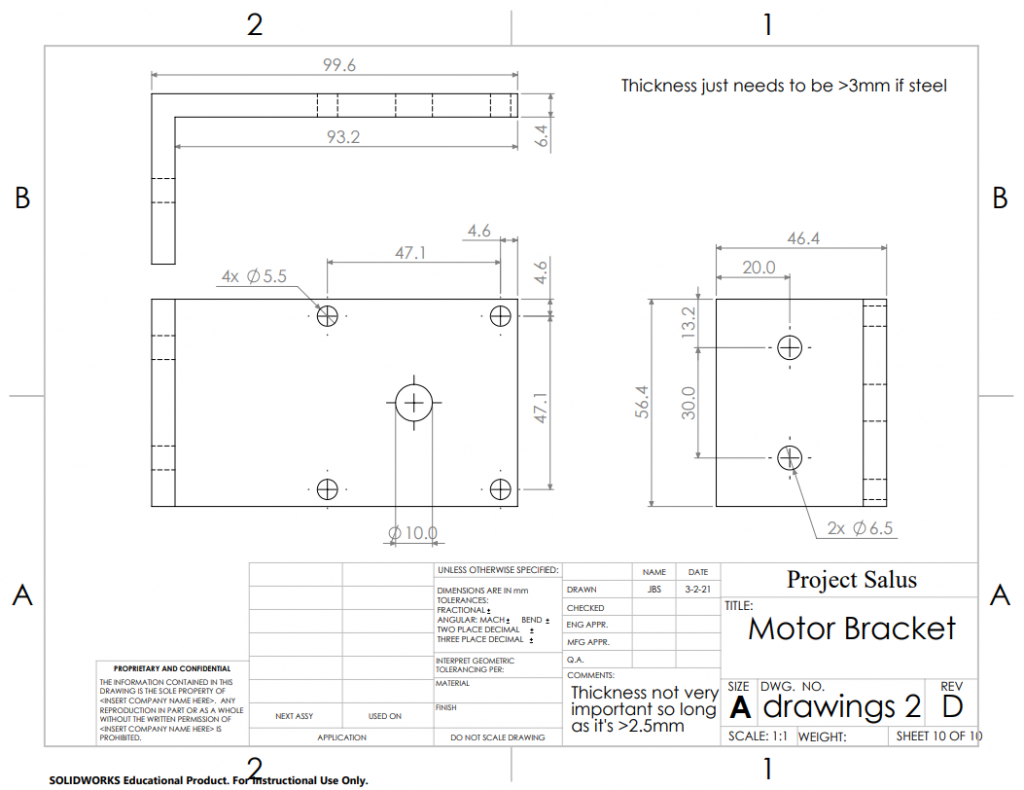
Engineering Drawings for Electrostatic Sprayer Actuator