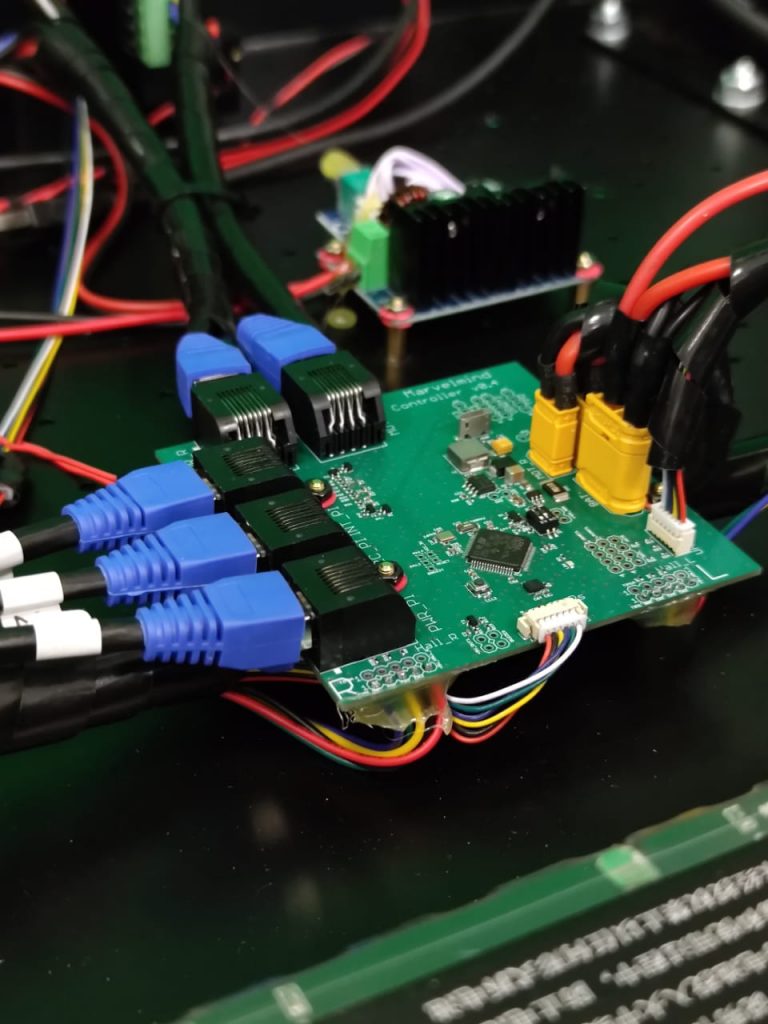
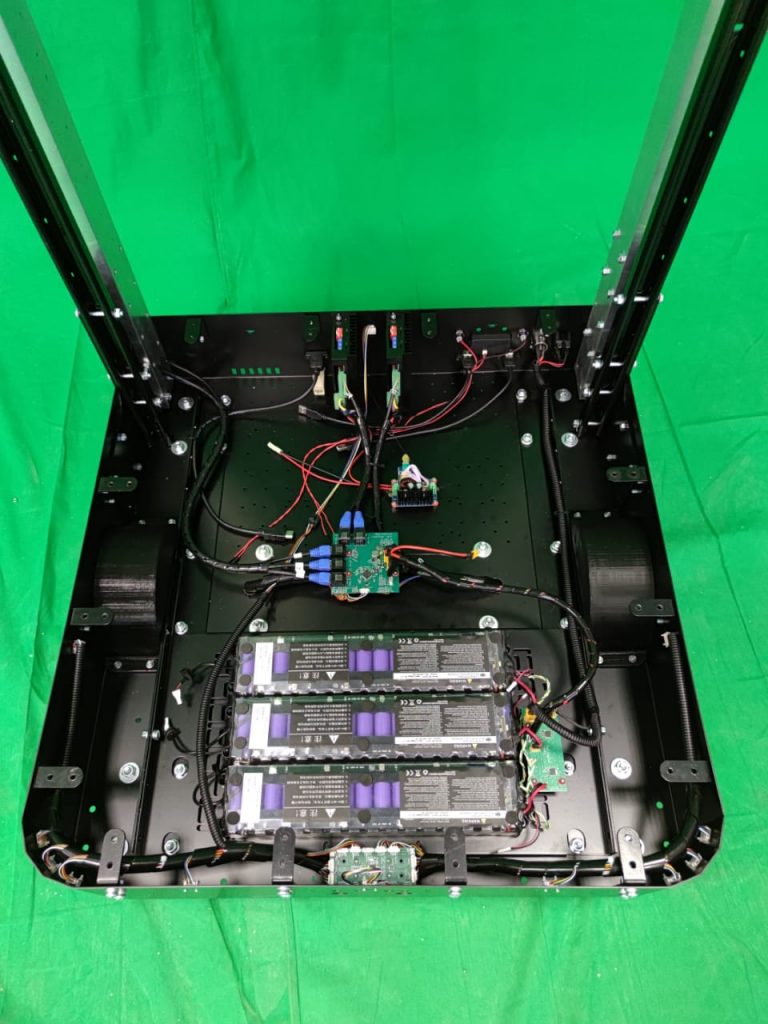
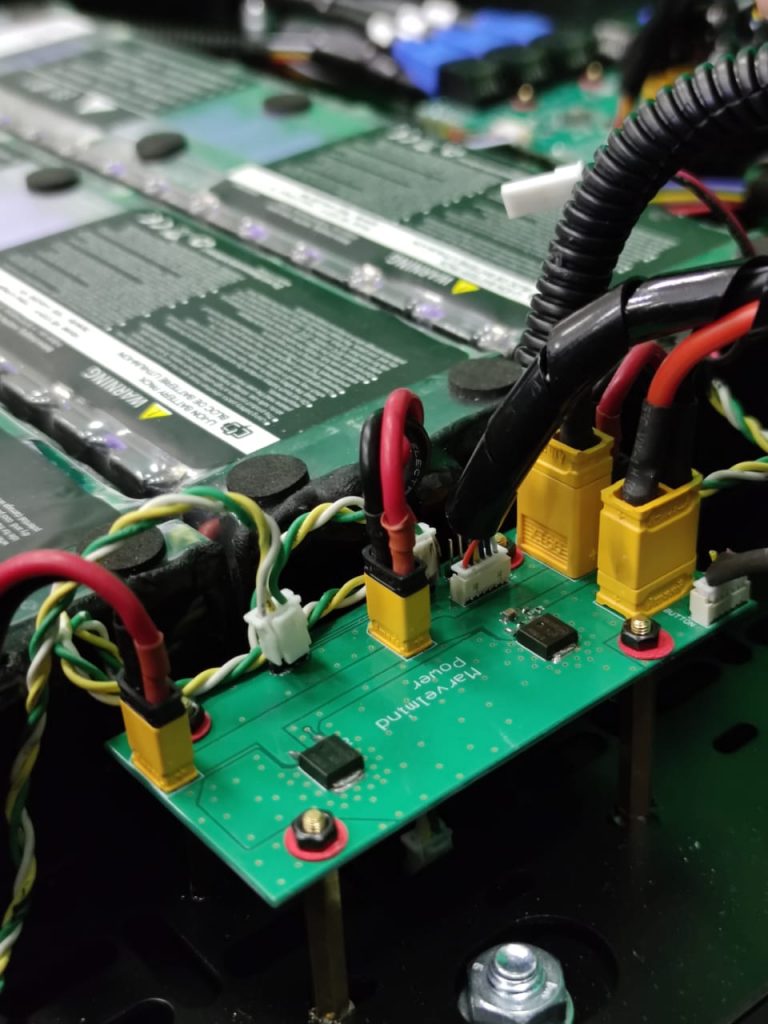
During our Fall semester leading into winter break, our first priority was setting the design specifications with Marvelmind. We worked meticulously with them to ensure the delivery of the robot would meet our mechanical and electrical needs so we could hit the ground running come Spring. The photos below are the post development photos sent to us by Marvelmind prior to delivery.


One of our driving technical requirements for Marvelmind was to ensure the delivery of their chassis came with space and electrical connectors for our NVIDIA Jetson Xavier. We worked with their engineering team to ensure we had a 12-19V barrel-jack connector which branched off their main battery.