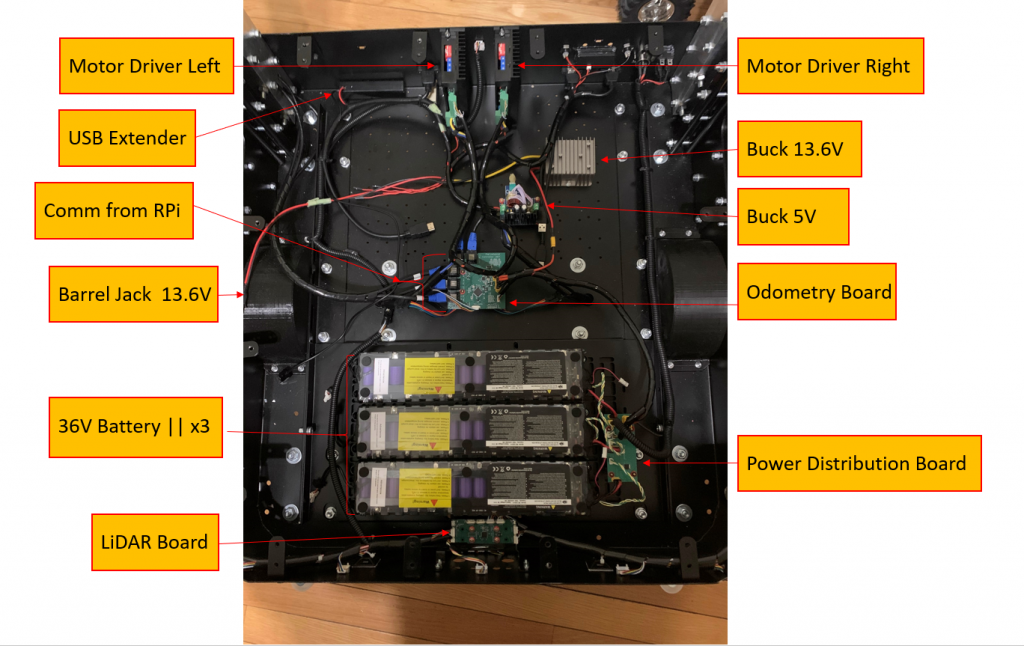
Upon delivery, the Marvelmind v100 base was successfully constructed. After being passed sparse documentation regarding the electrical wiring of the robot, our team was able to demystify the circuity prior to power-up. The actual power-on process went very smoothly and there was no visual electrical faults. After a number of hours of probing and scoping the circuitry, we now thoroughly understand each components role in the circuit.
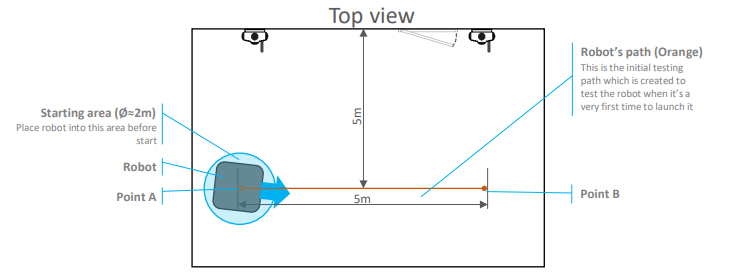
Once the robot was powered on, the next step was running a testing script provided from Marvelmind. This script instructed the robot to run between two points 5 times, verifying there was a communication pipeline between the modem and the on-board Raspberry Pi. In addition to communication, this test proves that the circuitry was properly connected. Within the Marvelmind interface, we can see the two mobile beacons mounted on the robot, as well as the two stationary beacons we have mounted 5 meters away from the unit. An image of the setup can be seen below. Once the unit was localized and the robot was in the correct starting position we successfully sent a command to the robot to begin the straight line test.
This video demonstrates how we are able to control the robot via Marvelmind’s straight line test.
Spring 2020 Progress
Once the robot base was up and running, the next step was to ensure we could successfully read and write to the robot via the custom API passed to us from Marvelmind. Thus far we have been able to query the sensors from the API. Some examples of the queries for the LIDAR in the ROS framework are below.
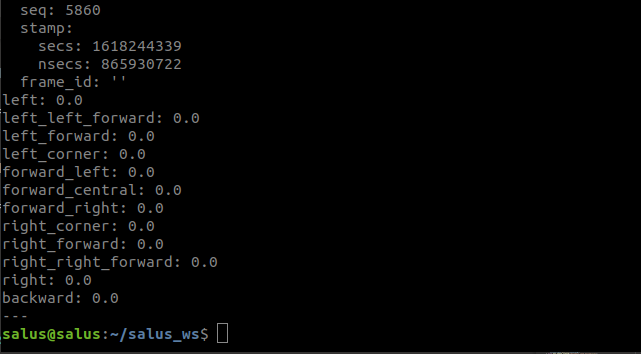
The next step is to drive the robot via the Marvelmind API in preparation for the the navigation subsystem tests. Once this is complete, all unit tests for the API will be complete.
This semester, we got the robot fully functioning and proved motor control via the API within our ROS environment. While the original timeline for mobile base setup was meant to end in late February, this was delayed due to an issue experienced with the Marvelmind odometry board. While the issue was never confidently diagnosed, we believe either the Raspberry-Pi or the odometry board was shipped with an electrical fault. After replacing both components, the base is now functioning as expected.
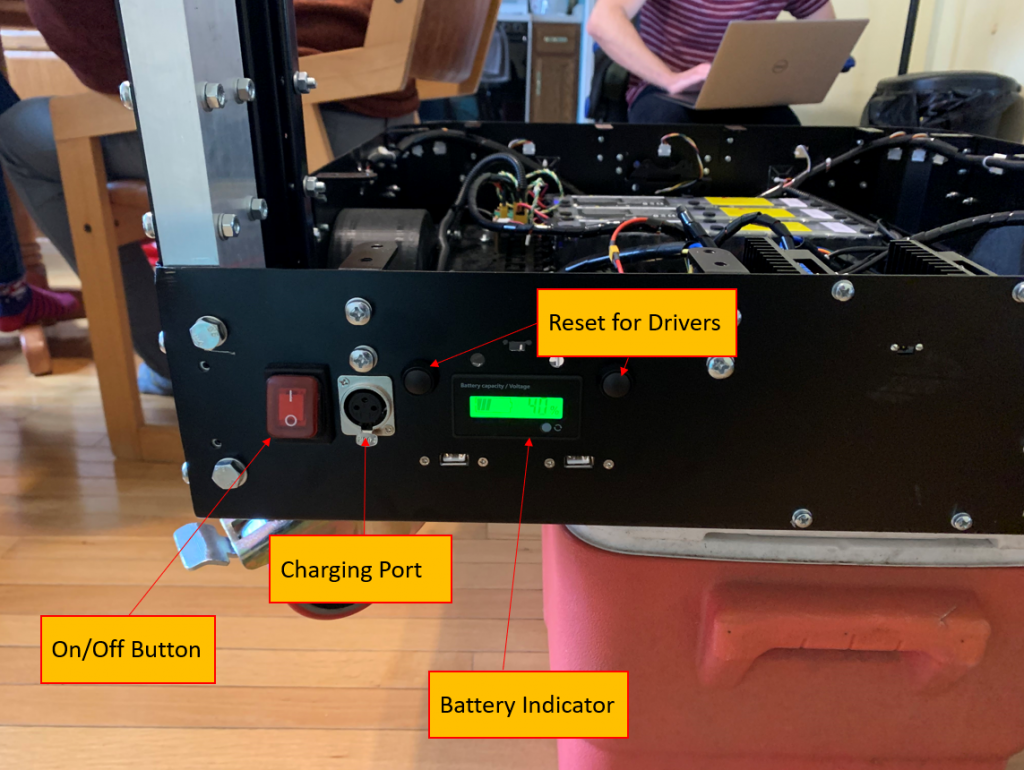
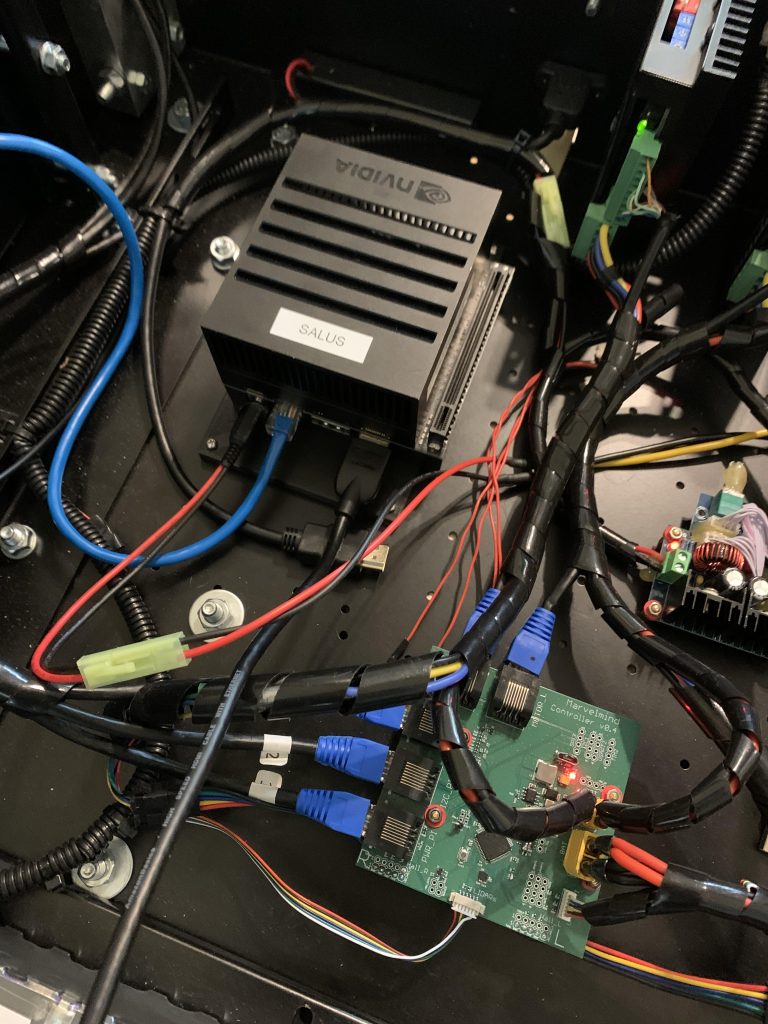
The Jetson AGX is mounted inside of the mobile base, as seen in the figure below. This device is currently powered downstream from a 36V -> 13.6V buck converter. We anticipated potential voltage dips in the input voltage line to the AGX, but this has not been an issue thus far. In addition to this, we have mounted a power monitoring PCB on the outside of the robot chassis. This PCB provides visual feedback for the power line from our battery to our AGX and the LIDARs. More information about the PCB can be found in the Documentation Tab.
Full Demo of Straight Line + Turn in Place Test via API Here.
Fall 2021 Progress
In Fall 2020, our priority has been to demonstrate full system integration amongst all subsystems. We have been testing point to point autonomous navigation both with and without obstacles. We have a number of successful trials with point to point navigation without obstacles. When attempting the full obstacle avoidance algorithm, we ran into some issues with the IPS localization data. We were able to resolve these issues by configuring the Marvelmind beacons in software such that they were oriented in the correct position relative to each other.
