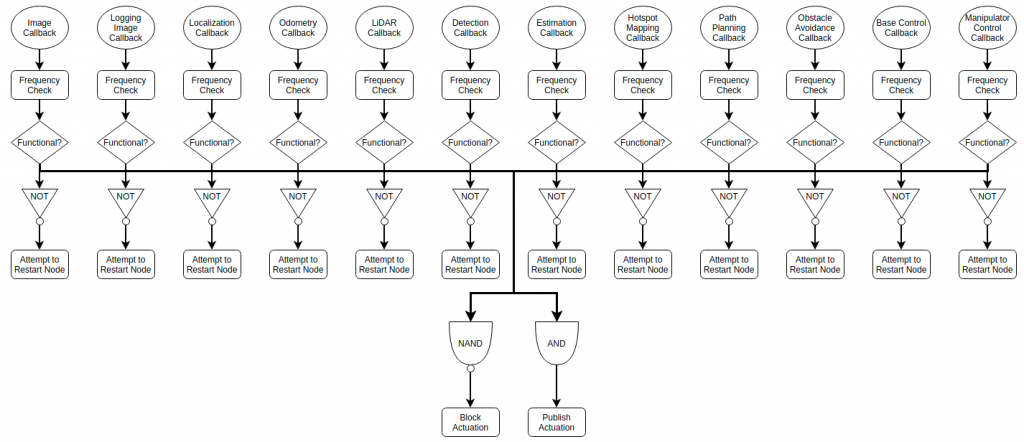
Watchdog’s purpose is to monitor the data flow throughout the entire Salus system. It will subscribe to the ROS topics published by each of the critical ROS nodes in the system and make sure the topics are being published at the correct frequency. If the topics from a particular node are stop being published at the correct frequency, Watchdog will attempt to restart that node. If any of the critical nodes are not functioning properly, Watchdog will block actuation commands from being published.