System Requirements
Mandatory System-Level Requirements
Mandatory Functional & Performance Requirements
Mandatory Non-Functional Requirements
M.N.1 The system will produce forces low enough for it to be safe around humans.
M.N.2 The system will provide a minimal and easy-to-interpret user interface design for surgeons.
M.N.3 The system will autonomously detect malfunctions and errors and notify the user accordingly.
Desired System-Level Requirements
Desired Functional & Performance Requirements

Desired Non-Functional Requirements
D.N.1 The system will allow for numerous successful surgeries, without the need for servicing and calibration.
D.N.2 The system will have a cost comparable to similar systems on the market.
D.N.3 The system will adhere to all relevant ISO standards pertaining to medical robotic systems.
D.N.4 The system will be of a size and dimension that is ergonomic.
D.N.5 The system will be designed such that it can be serviced easily.
D.N.6 The system will be designed to be easily sterilizable or sterile in the sterile field.
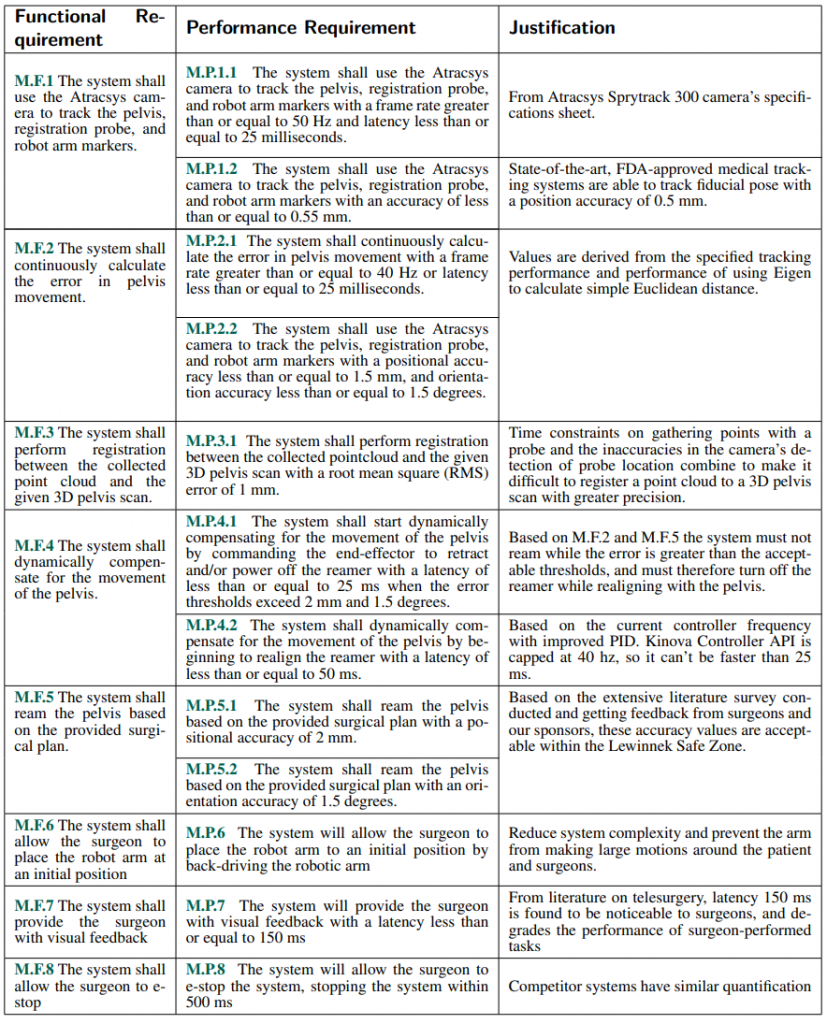
Deprecated Requirements
The following requirements are deprecated due to modified system architecture in Fall 2022, and based on sponsor feedback. The planning subsystem no longer exists and the hardware and controls subsystems had major overhauls based on needed improvement for dynamic compensation.
Mandatory System-Level Requirements
Mandatory Functional & Performance Requirements
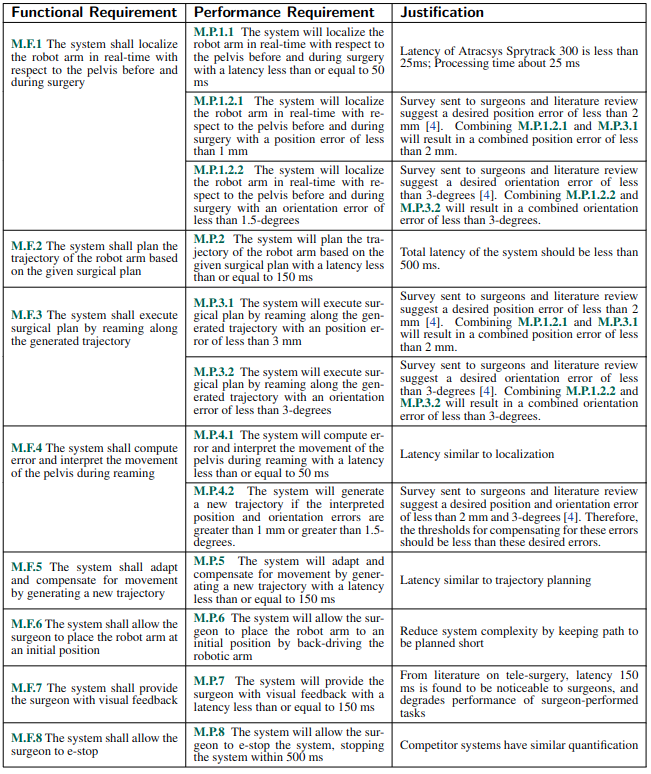
Note. Requirements M.P.3.1 and M.P.3.2 have been relaxed to 3 mm and 3 degrees because of hardware constraints since our arm does not have enough holding torque.
Mandatory Non-Functional Requirements
M.N.1 The system will produce forces low enough for it to be safe around humans.
M.N.2 The system will provide a minimal and easy-to-interpret user interface design for surgeons.
M.N.3 The system will autonomously detect malfunctions and errors and notify the user accordingly.
Desired System-Level Requirements
Desired Functional & Performance Requirements
Desired Non-Functional Requirements
D.N.1 The system will allow for numerous successful surgeries, without the need for servicing and calibration.
D.N.2 The system will have a cost comparable to similar systems on the market.
D.N.3 The system will adhere to all relevant ISO standards pertaining to medical robotic systems.
D.N.4 The system will be of a size and dimension that is ergonomic.
D.N.5 The system will be designed such that it can be serviced easily.
D.N.6 The system will be designed to be easily sterilizable or sterile in the sterile field.