
The functional architecture will be composed of input handling, perception, path planning and grasping, as shown in the figure below.
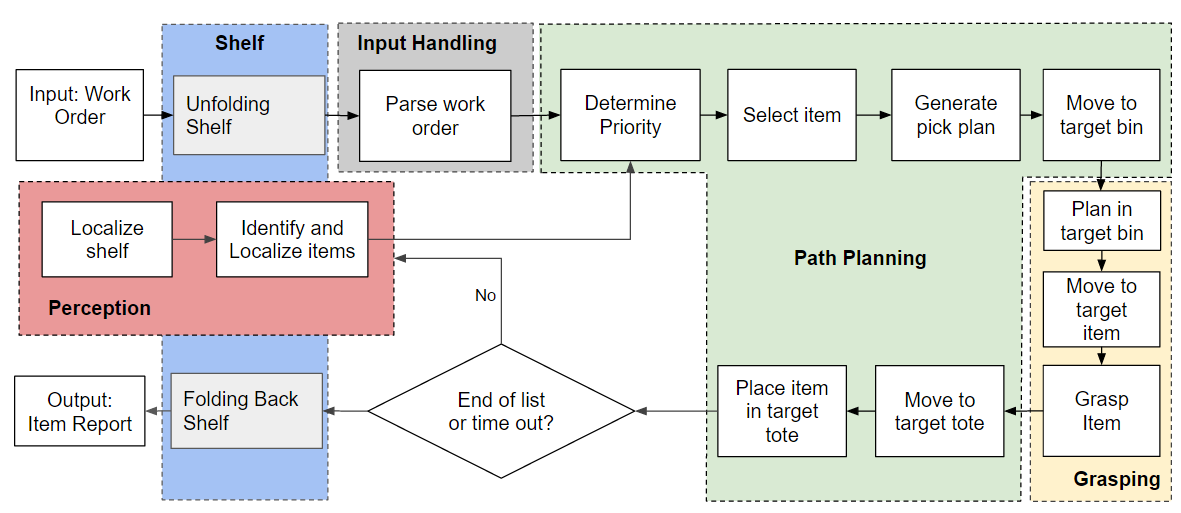
Input/output subsystem: This is the communication between the system and the human user. Input information is a work order, and the output information is a list of items picked by the robot.
Shelf subsystem: The shelf unfolds at the beginning of a pick task and folds back upon conclusion of the same. This function makes perception and grasping easier.
Perception subsystem: The vision pipeline needs to localize the shelf and identify items in each bin. Object recognition and pose estimation are the two main functions for perception subsystem. Accuracy in this section is vital for correct pickings.
Path planning subsystem: Planning takes the item location information from perception and gives the arm a trajectory to follow. The robustness and speed of planning is important for how reliable the system is and how fast the system can run.
Grasping subsystem: The end effector picks an item from the designated bin at a designated angle, based on the information from perception, such as the item pose and surface normal. Grasping tools or strategies could be different for different items.