
Grasping
Grasping (Software)
Grasping items can be broken down into two categories: deformables and rigid objects (non-deformables).
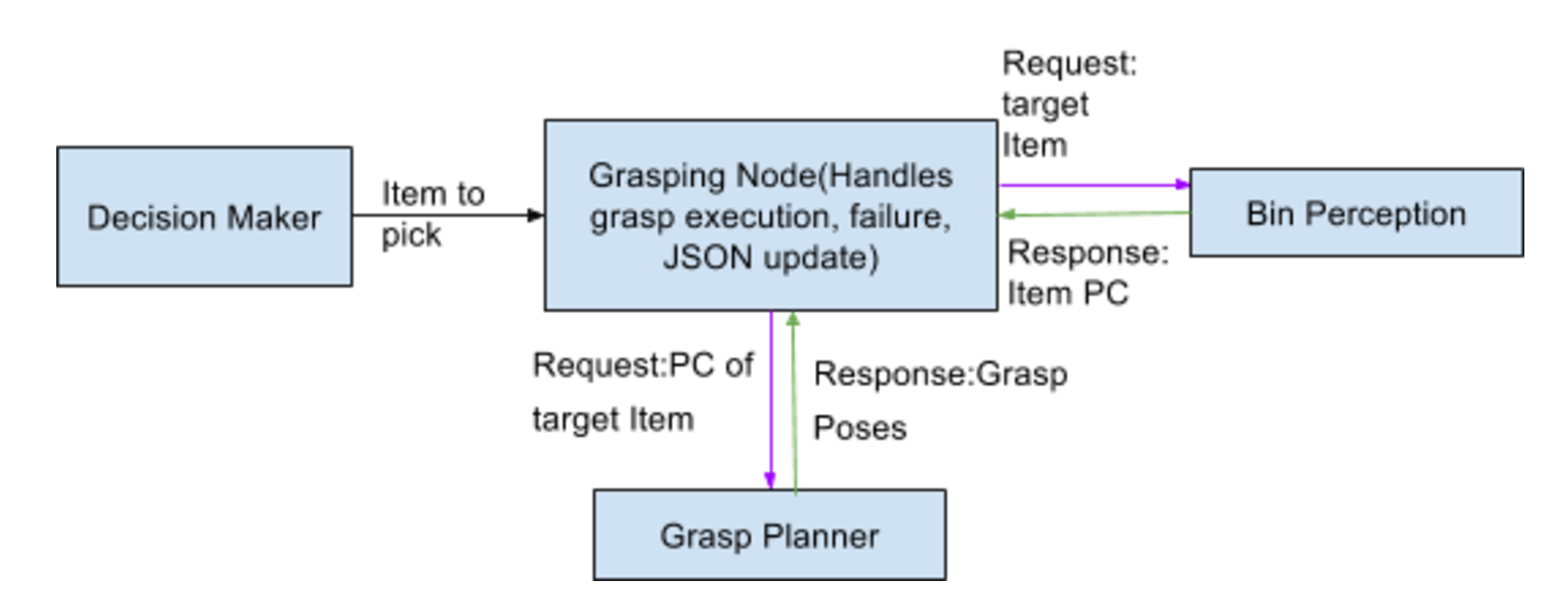
For deformable items the 6-DOF pose will not be available. The grasping subsystem is structured as a grasping node that interfaces with the decision maker in the state machine. The decision maker chooses the target item. The grasping node fetches the segmented point cloud of the target item from the vision system and requests the grasp planner for gripper poses. The gripper planner preprocesses the point cloud, computes grasp poses and uses a number of metrics to assign priority to the poses. The grasping subsystem interactions are modeled in the following image.
Grasping – Gripper Design and Fabrication
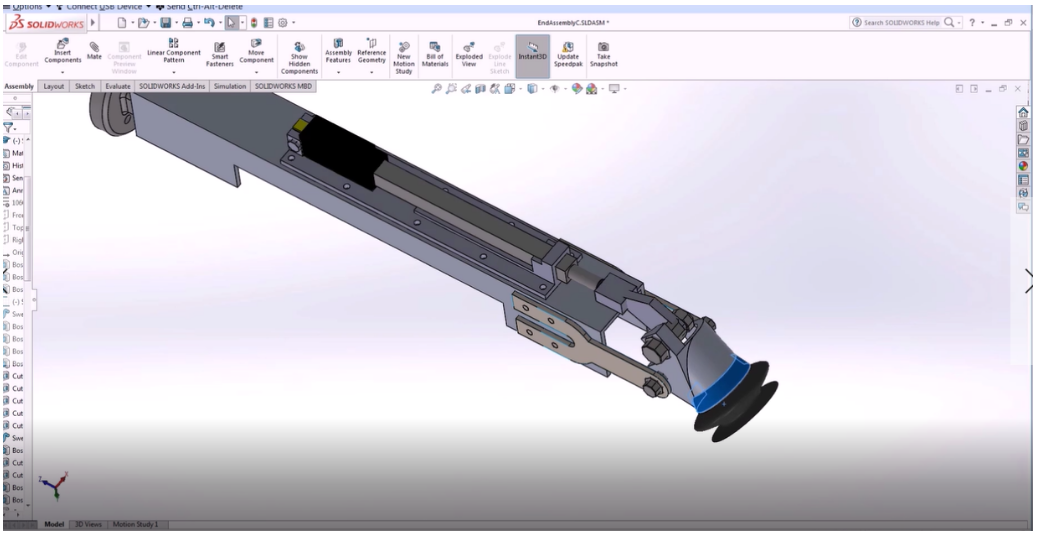
The gripper has been designed with the following goals in mind: having a narrow and lightweight but sturdy profile, possessing tight tolerances for the 1-DOF within a 0-90 degree range, and being composed of easily replaceable parts. To that end an aluminum C-channel has been chosen for the gripper frame, which allows for easy access to hosing which will be strapped to the inside of the channel and provides sturdy support while remaining lightweight. The gripper suction head and some of the linkages have been 3D-printed, allowing for a cheap and quick way to make small modifications as necessary. The remaining linkages are to be milled from aluminum or be composed of laser-cut Delrin. Shoulder bolts have been used for the pivots. The design was developed with the aid of the RI Machine Shop.
Grasping – Gripper Modeling and Testing
Modeling for the gripper linkages was accomplished through the use of SolidWorks. Mates were created within the design assembly which allowed only for free movement of the 1-DOF pivot. This simulation allowed the linkages to be adjusted until the suction head moved in the desired manner within the model.
Testing was accomplished through the use of a DC power source. The linear actuator was powered in both the forward and reverse polarity to check for the pivot tolerances.
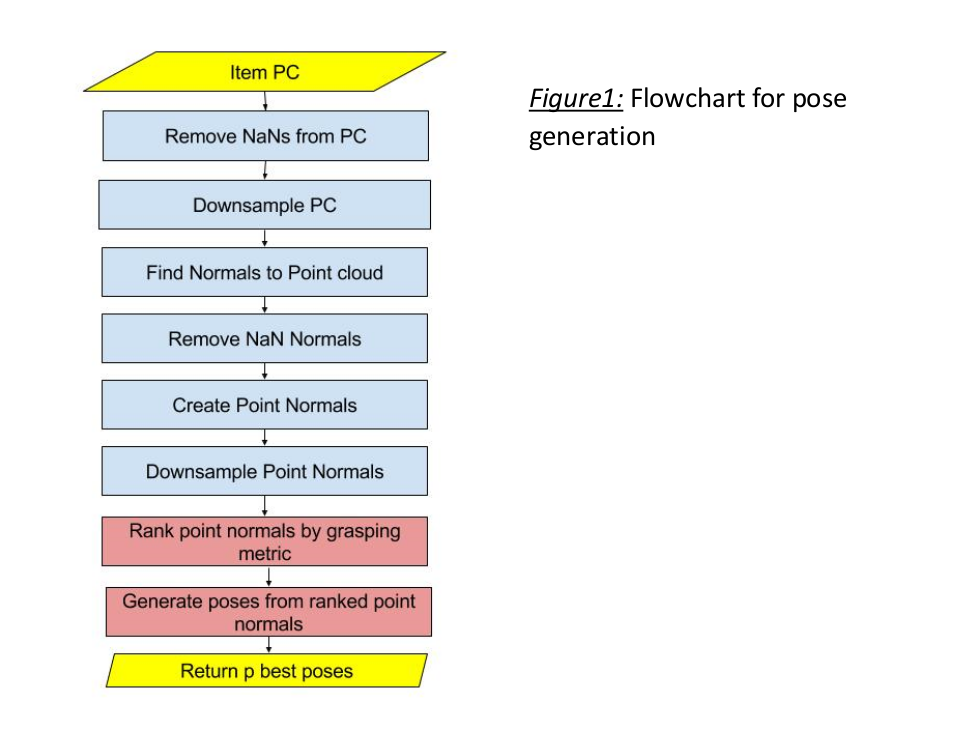
Grasp Planner Flow:
Grasp points for rigid objects will be determined on an experimental basis. Each item will have a library of associated valid grasp points stored within the Grasping subsystem. Grasping will determine the physical locations of these grasp points within the bin geometrically, through use of the 6-DOF information provided by PERCH.
In the case that an item has multiple valid grasp surfaces as shown in the image below, some surfaces may be more preferable than others (perhaps one surface has a sticker that has the potential to be removed, or provides a better suction surface than another, etc.). Grasps will be sampled on all surfaces and ranked as in the non-deformable case.
