Test Plan
Fall Test Plan & Validation Demonstration
Note: All requirement references in our Fall Test Plan & Validation Demonstration can be seen in our Requirements Post (not deprecated).
The schedule below shows the tests that our team plans to demonstrate at each Progress Review for Fall 2022. The associated tests and their details for each progress review can be found here.
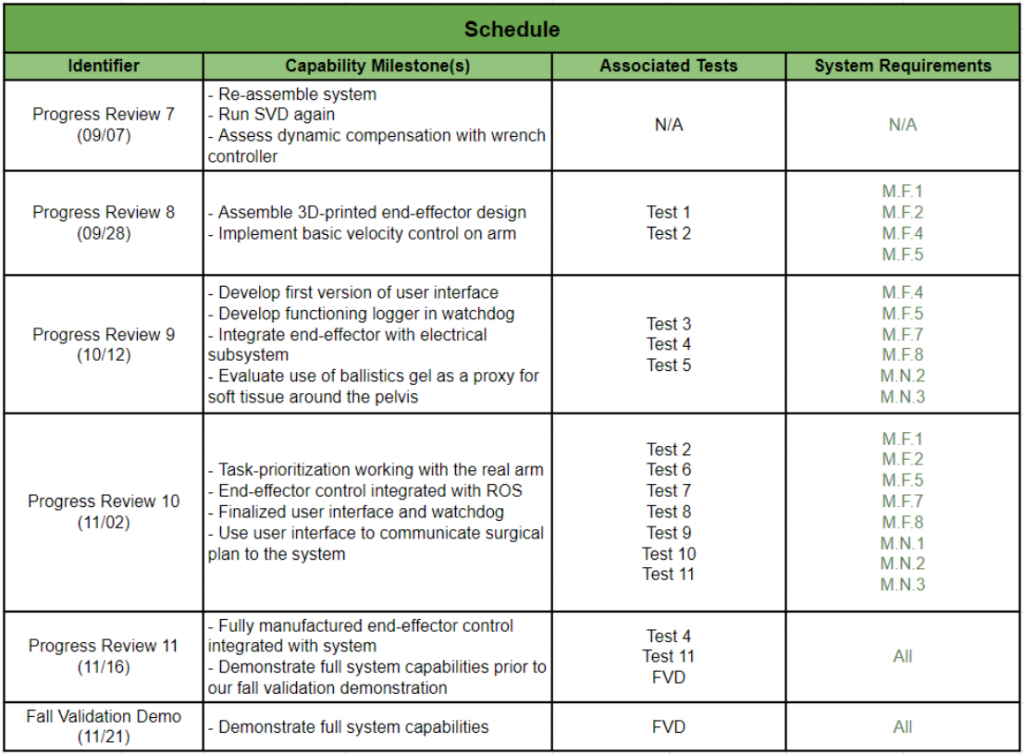
The objective of our Fall Validation Demonstration is to demonstrate that the system is capable of autonomously localizing and executing an acetabular reaming operation as it would be performed in an operating room, while presenting relevant information on a Surgeon I/O. We would be demonstrating this in NSH B512. Our demo would consist of one team member interacting with the robot arm and work environment, one member controlling the robot arm and monitoring the Surgeon I/O, and the rest presenting and answering questions.
The demonstration will validate the entire system consisting of the fully-integrated subsystems with optimized performance. The experiment will be set up with a test jig consisting of a pelvis that emulates the patient’s movement during surgery by being encased in a medium similar to soft tissue such as ballistics gel. To begin the demonstration, the person interacting with the UI will create a surgical plan using the 3D scan of the pelvis taken pre-operatively, placing the implant in the acetabulum of the pelvis in the UI. A marker array will be drilled into the Iliac crest and the pelvis will then be registered to the 3D scan of the pelvis. A surgical assistant will then place the arm near the site of reaming, and the surgeon, who is interacting with the UI will click the start button once all checks have passed. The robot arm will then execute the reaming operation using the surgical plan given, dynamically compensating for any movement of the pelvis during the operation from soft deformable tissue or movements by the patient (a team member will move the pelvis manually to simulate this movement). If the error goes above the thresholds (2 mm or 1.5 degrees, determined by requirements), then the reamer will retract and realign before continuing the operation. Once the operation is completed, the robot arm will retract and allow for analysis of the pelvis. During the operation, the surgery can be visualized through the Surgeon UI and system health will be reported using a combination of the Watchdog Module communicating with the UI.
For a definitive and more applicable metric about the success of the surgery, we will take a before and after reaming scan of the pelvis, and compare the material actually removed with the material that was supposed to be removed according to the surgical plan created within the UI. These scans will be taken using a Faro Arm and registration will be used to determine the reaming error. If the operation is perfect, the RMSE should be zero.
More details about our Fall Validation Demonstration and further metrics can be found here.
Spring Test Plan & Validation Demonstration
Note: All requirement references in this Spring Test Plan section refer to the Deprecated Requirements in the Requirements Post.
The schedule below shows the tests that our team plans to demonstrate at each Progress Review. Please note that Progress Review 5 is the Spring Validation Demonstration.
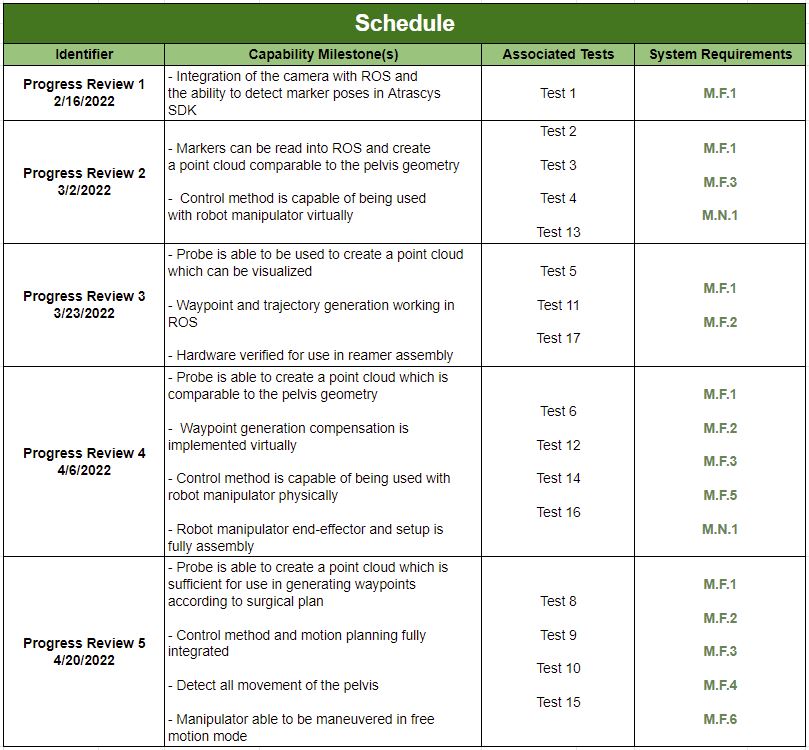
For the Spring Validation Demonstration (Progress Review 5), we will be demonstrating the following tests:

More details on our Spring Test Plan can be found here. In addition, a brief overview of our Spring Validation Demonstration plan can be found here.