FVD System Performance
The demonstration for the G.H.A.R. system during the Fall Validation Demonstration (FVD) was the conclusive demonstration of all the subsystems (Planning, SLAM, UI, and Robot) all together. The performance was evaluated based on a single test case which was comprised of different map configurations and sub cases; the main test case was demonstrated as follows:
- Criteria 1: Freely Steppable Obstacle Height (FSOH)
- Obstacle in place that will be traversable for the Unitree.
- Two obstacles with the same height – LoCobot
- Criteria 2: Maximum Traversable Slope (MTS)
- An obstacle with a small slope (traversable by both)
- Criteria 3: Robot Radius
- The robot radius parameter was varied to demonstrate the effect of changing the robot’s base radius on the path generated.
The map configuration that was used for the test case can be seen in the figure below, along with the generated path from the planner from both the LoCobot and Unitree. Please note that these results are taken from FVD encore, due to communication/connection issues with the robots during the initial FVD. Below are the results for FVD Main Test Case.
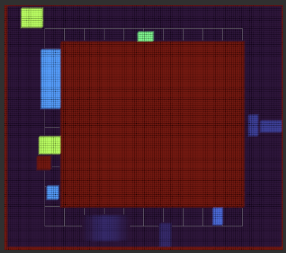

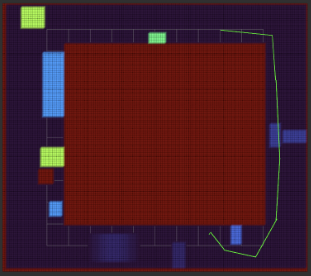
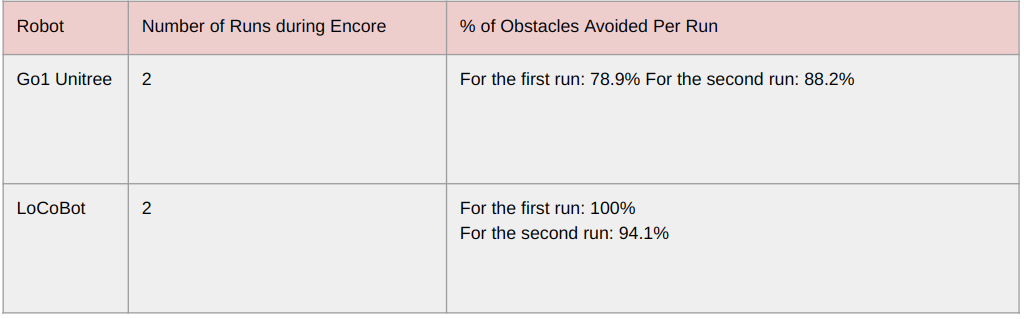
The map is populated with different obstacles that represent the criteria demonstration and the path that the robot generated was one that prioritizes the capability of each obstacle (i.e. Unitree traversing the obstacles). As seen in below table, the obstacle avoidance criteria was satisfied during both runs conducted. The first run conducted referred to the main test case and the second run referred to the Encore test case (increased speeds for LoCobot and higher slope traversals for the Unitree). During both runs there were manual interventions, meaning the robot’s remote control was used to manually steer it back on the generated path, necessary for the Unitree. This issue was also seen during tests/dry runs leading up to the FVD, and this was largely due in part to the lack of visibility of the ArUco markers when the legged platform was too close in proximity to the marker resulting in no detection being made. Another issue that could have contributed to this was the oscillation/vibrations in the realsense when the Unitree was traversing the generated path. This was caused by the robot’s controller itself as there was a bit of latency (when stopping) and while moving the robot’s camera shakes which distorts the images outputed by the sensors. To mitigate these two risks the team opted to use two different sizes of ArUco marker, with a minimum size of 250mm (in length and width) and a larger sized marker. The larger marker was used specifically for the Unitree, and while this helped to reduce the frequency of manual intervetions it did not completely eliminate the need for the interventions (hence the results below). Lastly, the paths generated with an average time of 1.3 seconds.
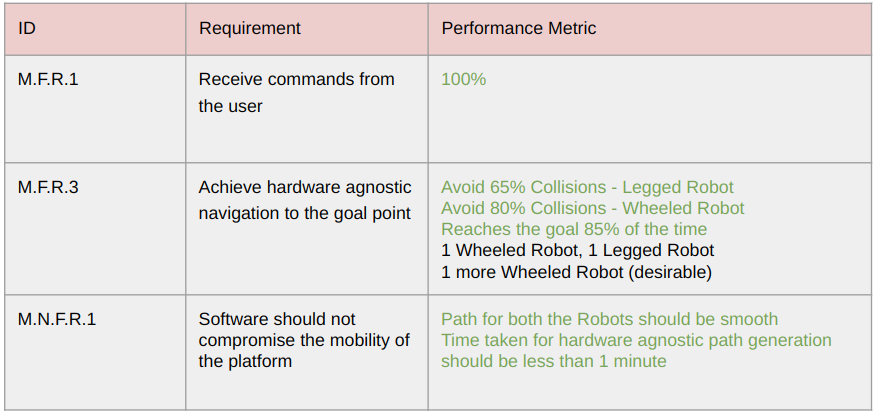
The main requirements satisfied during the FVD are identified below.