The User Interface (UI) module allows the user to control the software and receive feedback on whether the robot was successful or not. The user inputs include the robot parameters, start and goal points, as well as selection of a custom map (in simulation). The interface also notifies the user whether a path was generated by the planners or not.
UI subsystem aids the communication between the user and navigation software. The user gives the software three main inputs, namely, the robot parameters, the goal point, and the object of interest. The software then outputs the object detection result, as well as the planning success or failure, for both local and global planning. The inputs and outputs will be taken and displayed from a simple command line or Qt interface respectively, that runs on the off board computer.
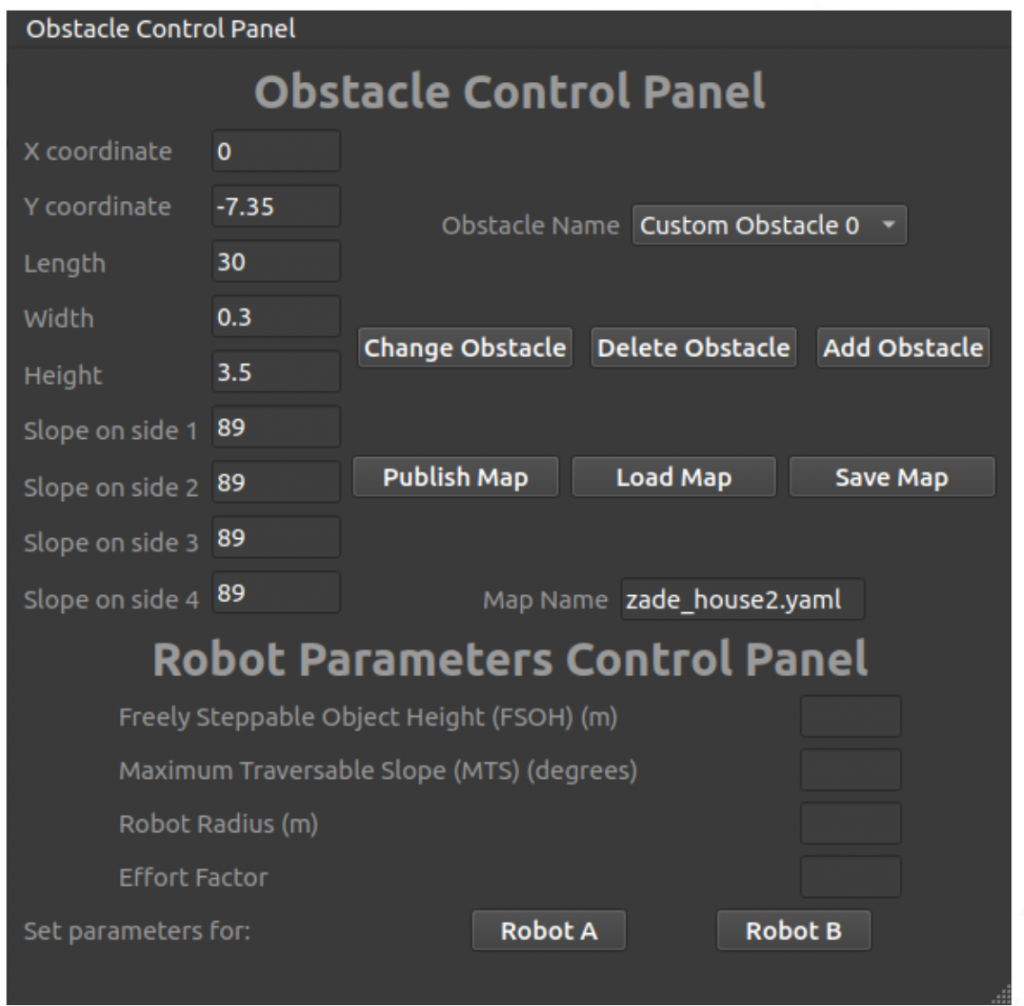
With this Obstacle control panel Qt GUI interface could also change all 4 robot parameters for two robots. This allowed the tester to see the changes in path when the robot parameters change.
Additionally, we also developed a RQT GUI plugin interface that controlled planner parameters such as the number of iterations, the random seed, the neighborhood radius, etc. and allowed changing the start and goal location as well.