
System Description
NASA is planning an exploratory mission on Mars to probe cave networks for information on their structures and the mineral composition on the surface layers of rock and sediment. These findings can further inform our scientific understanding of Mars and its suitability as a location for human inhabitation. However, it is extremely costly to send humans to scout and look for desirable landing locations and areas of interest for future scientific missions. Arcus is a UAV (unmanned aerial vehicle) that will generate real-time map data to give scientists and users the critical information necessary to make informed decisions on how to allocate precious resources when on Mars. Arcus combines LiDAR (light detection and ranging), RGB imaging, along with hyperspectral (non-visible light) imaging sensors to create data-rich maps that will highlight specific objects of interest fused with spatial geographic information. The final vehicle will be designed to fly inside of, discover, and autonomously map fully enclosed, non-uniform environments.
In the scope of the MRSD project, Arcus will be a remotely piloted UAV that will generate this map information in real-time. It is intended to be used as a rapid prototyping platform for developing navigation and planning algorithms, as well as provide software and hardware modularity to accommodate different types of imaging sensors. The platform and the software provided allow researchers to easily hook into ROS to retrieve point clouds describing the environment containing various sensor measurements. Researchers would then develop algorithms which analyze the map and make decisions regarding future behavior. For example, if a branch of a cave seems to tighten in diameter the robot might make the decision to ignore that route to explore because it might be too tight to examine. However, if the entrance to that branch is coated in rich minerals that haven’t been observed before, the robot might make the decision to traverse down that branch to gather more information.
Use Case
Prior to a fully manned mission to Mars, NASA will send out robotic scouting missions to determine both the planet’s suitability of habitation, and a potential landing spot for a human habitat. Similar missions are planned for the Moon, where scientists are trying to uncover the actual quantity and location of water around unique geographic landmarks. A mapping UAV will be prepared for the unique requirements of each mission. A moon UAV will likely be propelled by rocket-powered thrusters, whereas the Martian atmosphere would accommodate propeller-driven flight. Sensors such as spectrometers, hyperspectral imagers, and distance ranging equipment would be loaded for the detection of various molecules, water, or precious resources. Mission parameters will be loaded onto the vehicle, such as general location of interest coordinates, and specific features to search for.
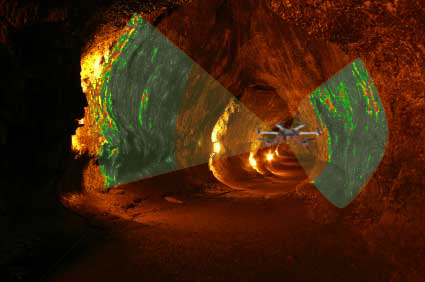
Upon delivery as a rocket payload to the terrestrial surface, the UAV will deploy from its base station, and plan a path to its first waypoint. While en route, due to communication latency, the UAV will have to make decisions that will optimize its battery life to focus on successfully completing mission objectives. As seen in Figure 1 below, real-time fusion of map structural data with hyperspectral imaging data will allow for the drone to quickly identify specific features to follow up with higher-resolution data capture. After a predetermined amount of battery consumption, the UAV will return back to the landing site for high-bandwidth data communication back to Earth. Using these high-fidelity data, scientists will then be able to better inform their hypotheses about the characteristics of the celestial body, and much more quickly determine its suitability for human habitation or resource acquisition.