Components
- RC controller
- Telemetry antenna
- RTK GPS
- CPU
- Display unit
- Router
The RC controller gives flight commands to Arcus through the Pixhawk flight controller at 2.4 GHz. The telemetry antenna receives information from the Pixhawk about the battery state, the flight state, and any Pixhawk debugging messages. The Real Time Kinematic (RTK) Piksi GPS gets centimeter-resolution accuracy on the position of Arcus that is used as a ground truth for which we compare the accuracy of our mapping algorithm. Over WiFi (2.4 GHz) through the ROS network, sensor data is received from the LiDAR, RGB camera, and IMU. The display unit allows visualization of the point cloud in real-time. Currently, online map generation is not running, so map generation would take place at the base computer.
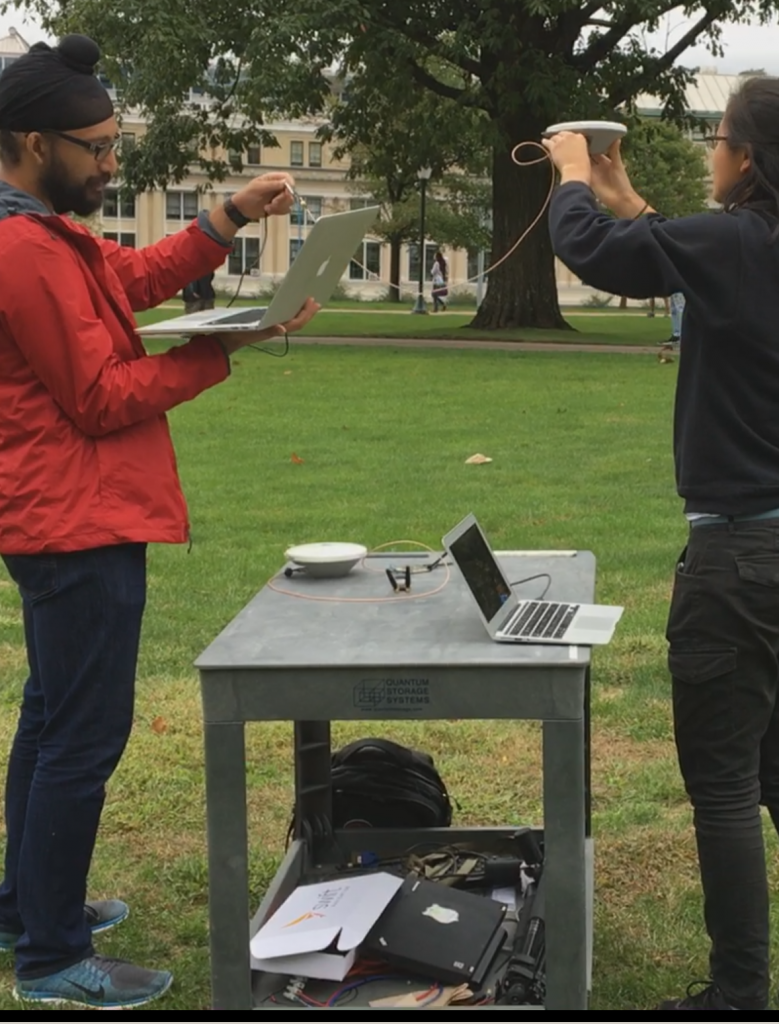
We have conducted several field tests already where we needed to set up the ground control station. The one below is from our first field test near the Cut on CMU campus, where we bagged some GPS data from the Piksi. We were using survey-grade GPS antennas because we were not getting a good GPS lock with the provided antennas from Piksi.
The base station implementation is now complete and awaiting integration with the remaining components of the system.