Perception
- RGB Camera (mvBlueFox-MLC200wG)
- LiDAR Sensor (Velodyne VLP-16)
- IMU (VN-100 Rugged)
- Custom Sensor Mount
The perception subsystem collects imaging and positional data and forwards it to the relevant subsystems on and off board Arcus. Calibration was a very crucial part of assembling this subsystem, where we needed to get camera intrinsics and extrinsics calibrated for pixel error and distortion, and movement, respectively.
Camera intrinsic calibration using Kalibr
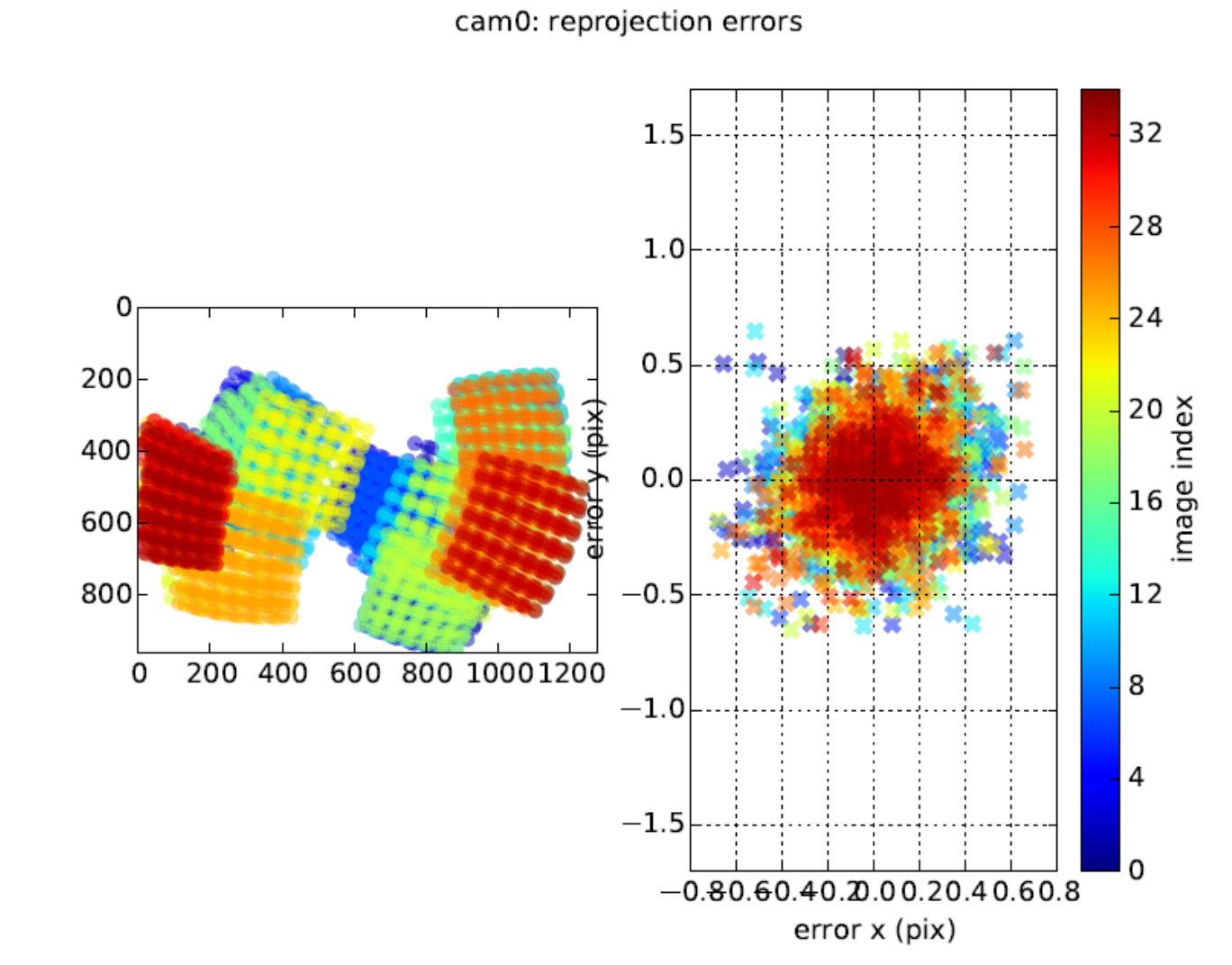
Kalibr was used to calibrate the camera intrinsics to get a pixel reprojection error within 0.8px.
Kalibr was then used to calibrate the Camera-IMU extrinsics to obtain the camera-IMU axes transform. The camera reprojection error was reduced to 1px. But it will be later recomputed for greater reprojection accuracy, after conducting full-system flight tests
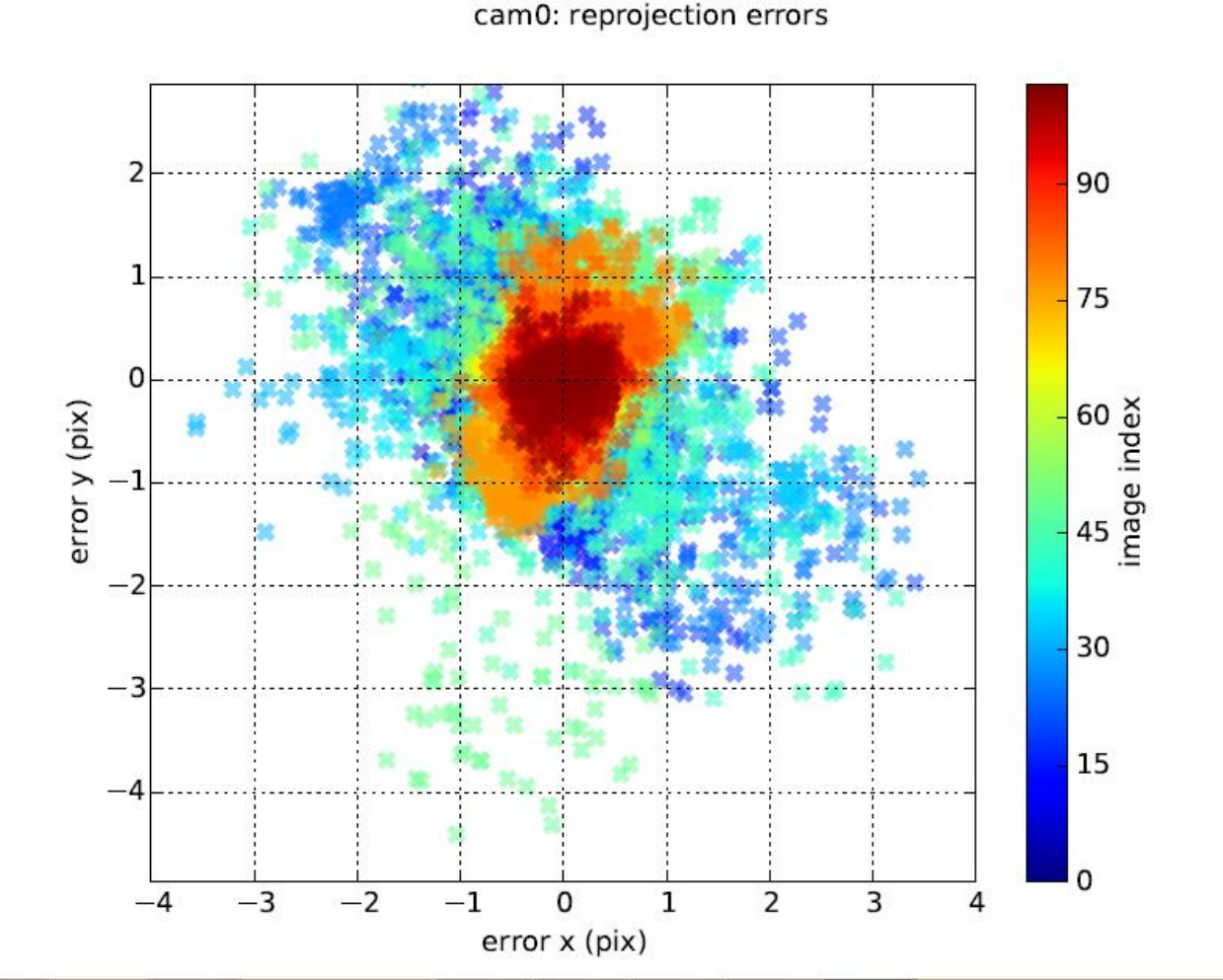
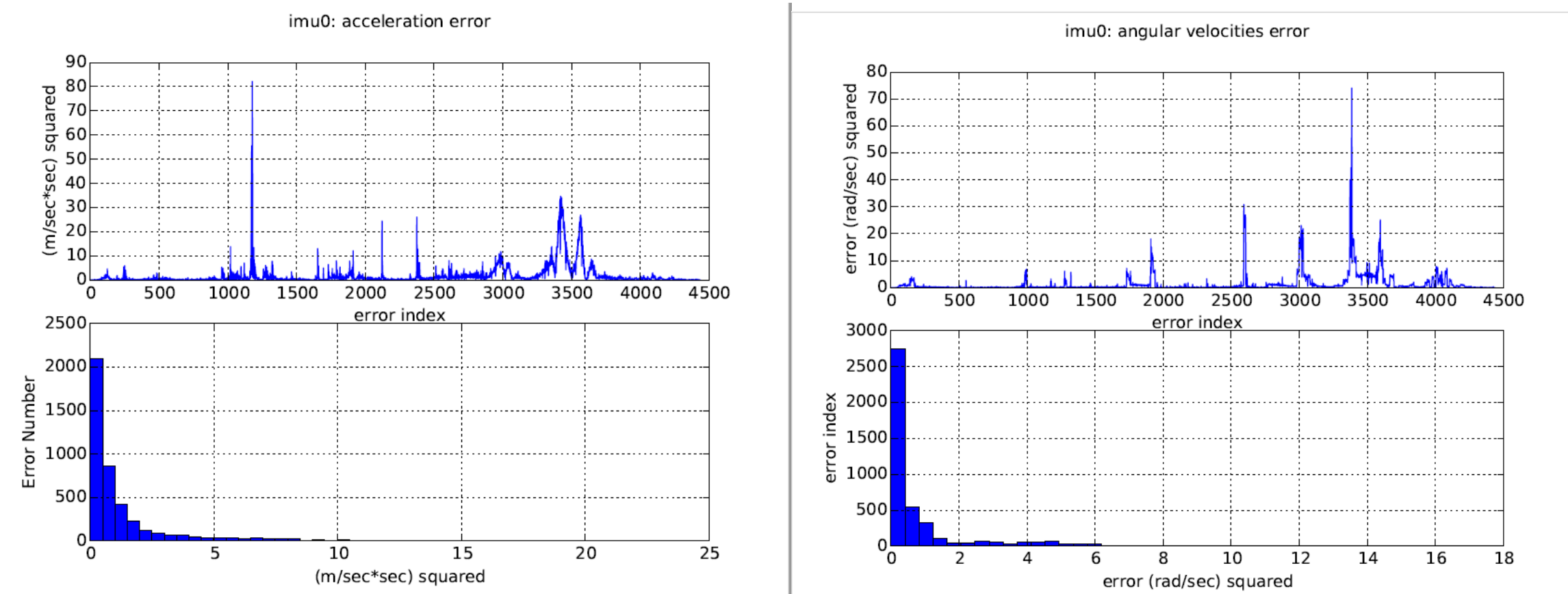
Kalibr Camera-IMU Extrinsic Calibration results. Top: Camera reprojection errors, Bottom (from left to right): IMU acceleration prediction errors, IMU angular velocity prediction errors
Additionally, the IMU-camera extrinsics needed to be calibrated for distortion correction and the LiDAR-camera extrinsics needed calibration for map matching.
To keep our calibration true, we needed to design a sensor mount to keep everything rigid. Starting off, some preliminary designs were sketched out.
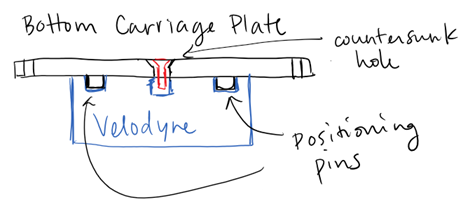
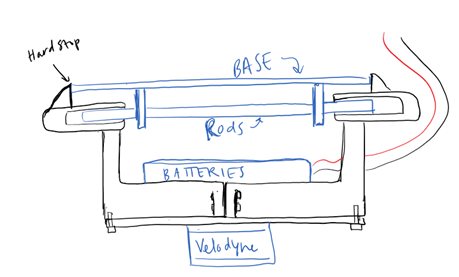
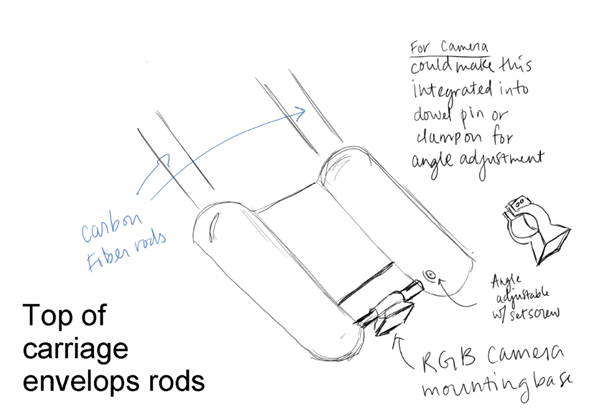
The mount undercarriage hangs below the bottom base plate from carbon fiber rods that the undercarriage envelops. The battery, LiDAR, IMU, and RGB camera were all planned to be installed onto this mount.
This is the initial version of the undercarriage mount.
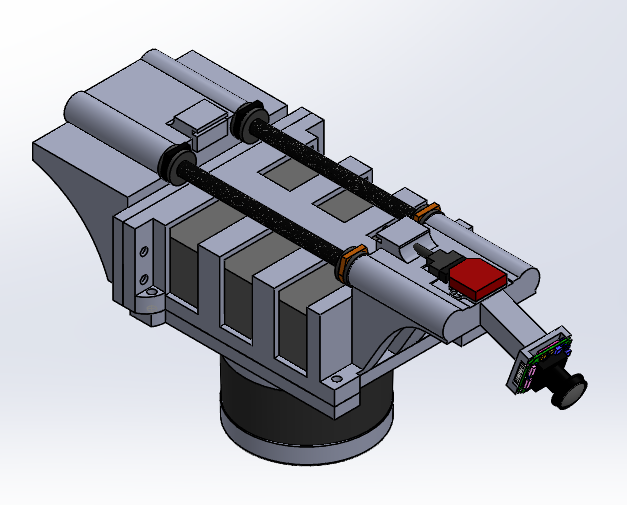
After further refinement and filleting, this is the final mount that was 3D printed. The base plate was made out of MDF for the initial prototype but we will switch it out for an Al-6061 plate.
Finally, we have installed the sensors and batteries to make sure that everything fits.
