Our mapping system currently uses offline mapping with the Berkeley Localization and Mapping algorithm.
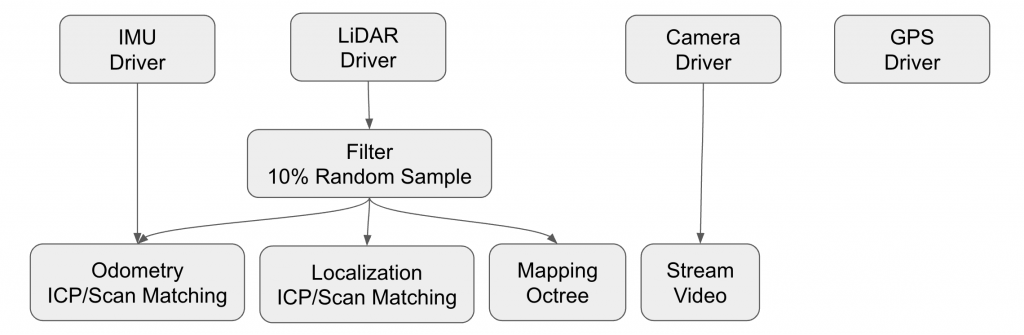
It takes in point clouds of data over time, filters them to reduce the number of points to deal with, and computes incremental position estimates over time using Generalized ICP. It then maps and the points and then computes an integrated position estimate by localizing itself in the map. It also performs laser loop closure automatically using existing map and new point clouds.
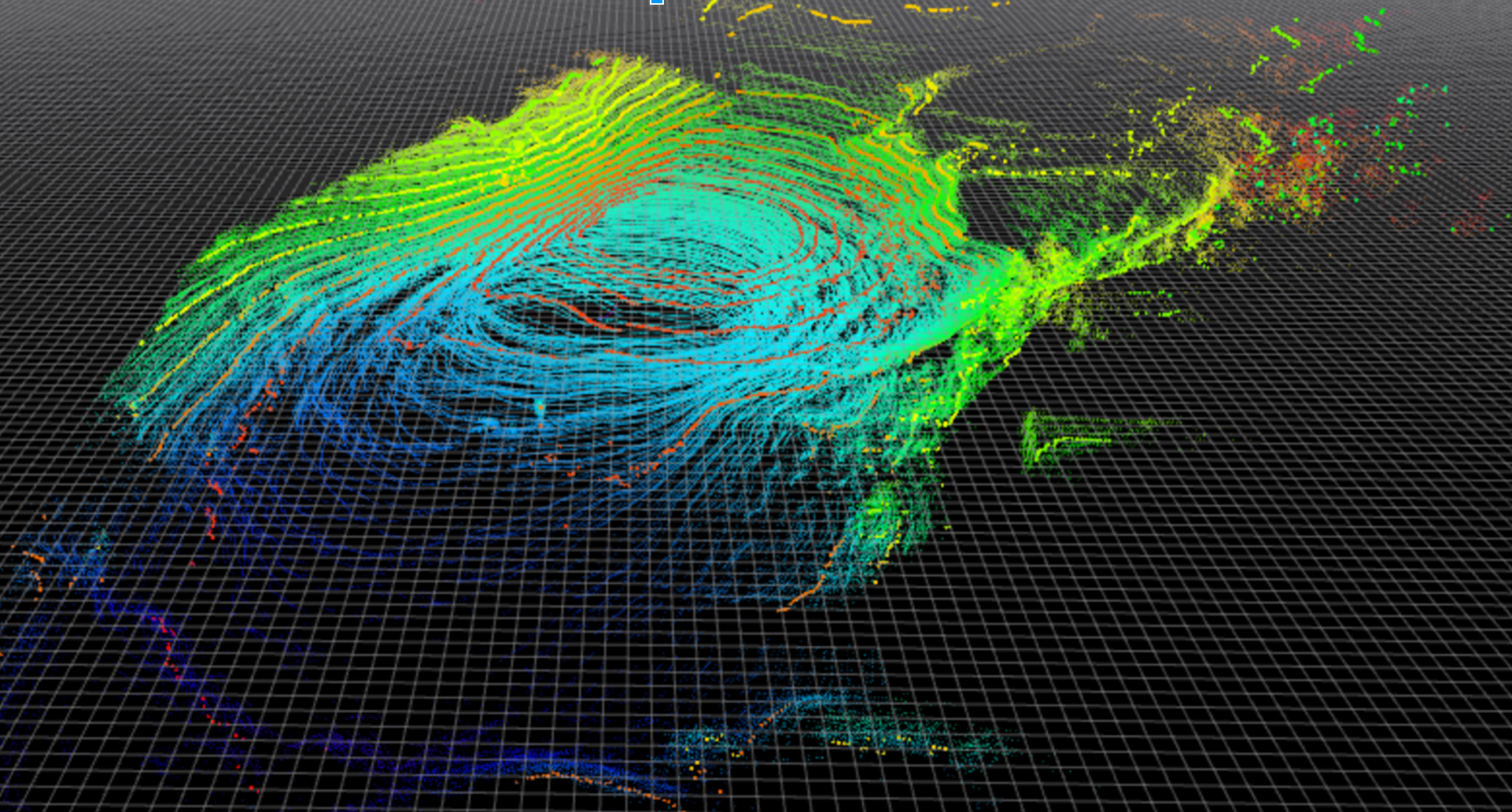
Here is a visualization of a map partially generated by BLAM.
Below is a video of our mapping system working in simulation, generating colorized point clouds from velodyne and RGB camera data.
https://www.youtube.com/watch?v=RK0FCifyR44
Additionally, here is a video of the RGB projected color data into the velodyne point cloud.
https://www.youtube.com/watch?v=muoX-tetfog