Report
Check out our final project report and poster!
Spring Validation Experiment
The spring validation experiment videos are seen below. These videos demonstrate the performance of the full system, including online map generation, localization performance validation, and autonomous exploration in simulation.
https://www.youtube.com/watch?v=eN4vnYmoY2k
https://www.youtube.com/watch?v=oJwNwsTwP_w
https://www.youtube.com/watch?v=r5va7mgXalQ
Localization Performance
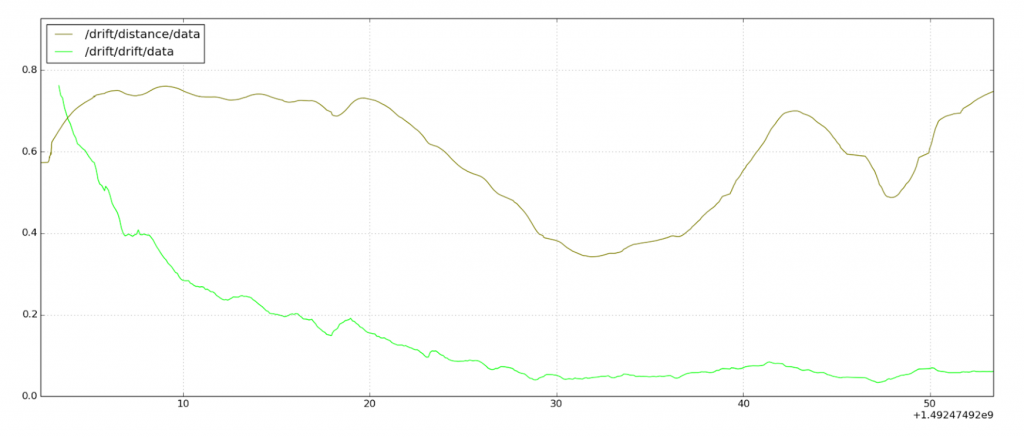
The system performed well and met all of its performance requirements. The figure above shows odometry drift error was reduced to less than 0.1m per meter traveled and that the vehicle was localized to within 3 meters of the ground truth position. It shows that by the end of the run the drift over distance traveled is about 0.08m and that the state estimate was never more than 1 meter away from the ground truth. These correspond to MPR4 and MPR8 respectively. This was validated in the flight cage using motion capture data as the ground truth.