Mechanical Evaluation
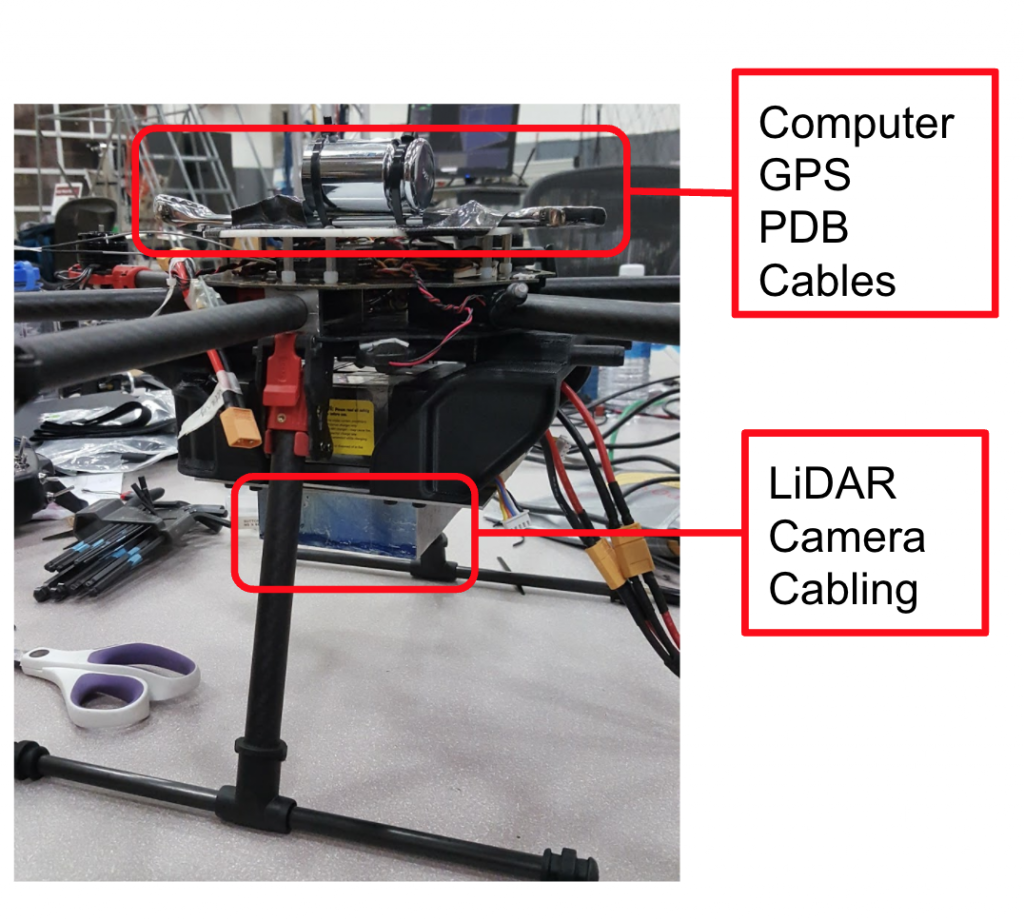
A dummy payload was used in order to properly assess the vehicle’s ability to ably fly and maintain control with our full sensor and flight payload. Equivalent masses were fixed to the vehicle top and bottom, and the vehicle was flown under safe, manual conditions in the flight net in the Planetary Robotics Laboratory. The total payload weight was 5.35kg, identical to the final flight payload.
https://www.youtube.com/watch?v=Qx1nuGNB0oI
Mapping, Localization Evaluation
Four separate plots below detail the performance of the vehicle localization and mapping package.
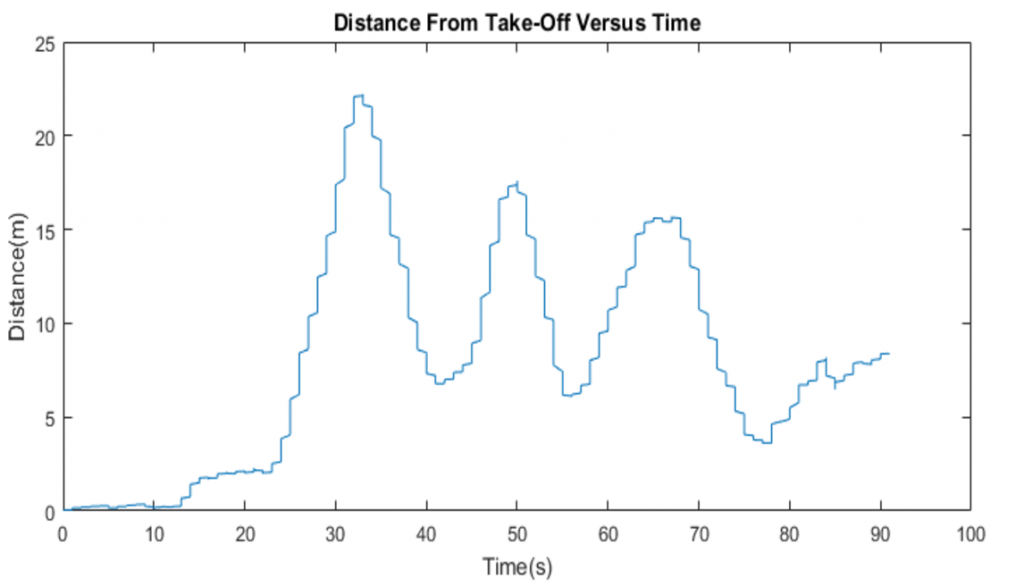
Distance from take off: This plot visualizes the absolute distance of the vehicle from the original take-off point, demonstrating that teleoperation is indeed stable from at least 20m away, per our validation requirement.
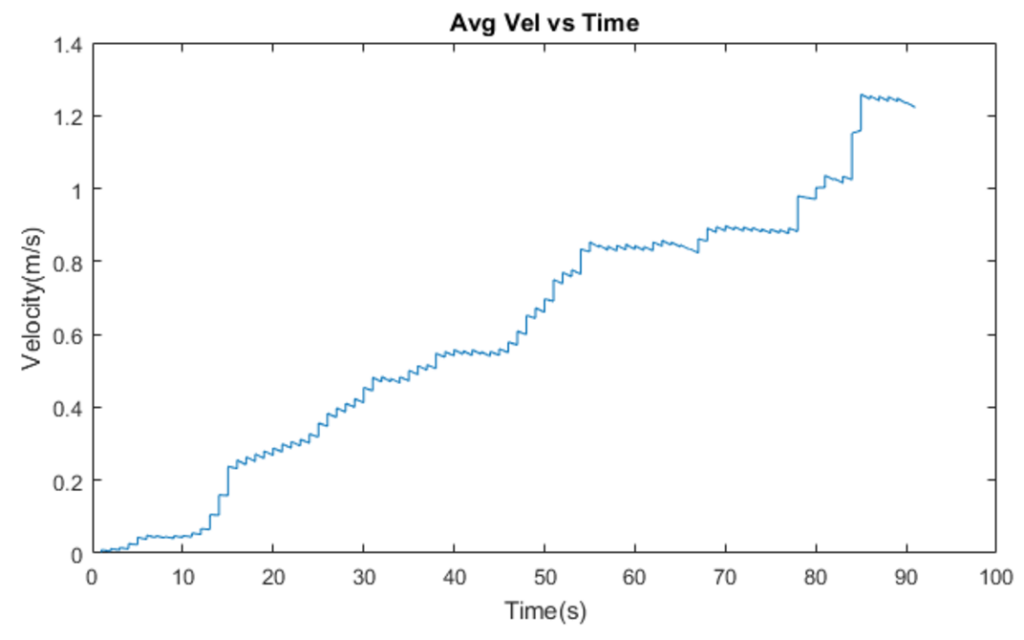
Average velocity: This plot shows the instantaneous average velocity of the vehicle, demonstrating the ability of the vehicle to map and localize while operating at a speed of at least 0.25m/s.
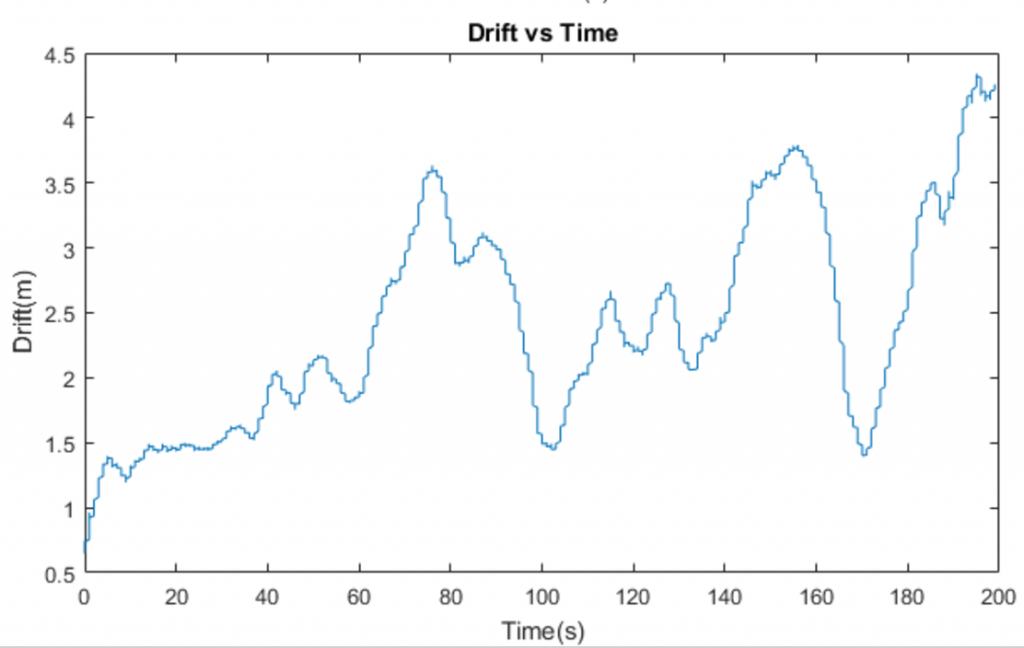
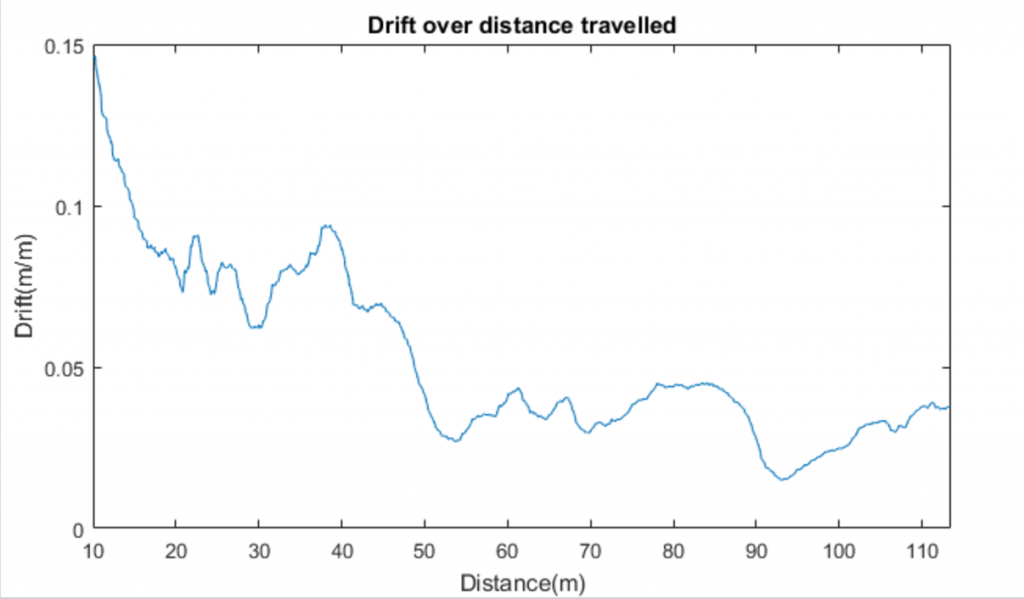
Drift over distance travelled: This plot shows the drift (meters/meter) that the vehicle has at a certain point in its trajectory. We demonstrate that the drift remains well below the target 1m/m spec.
Total drift relative to ground truth: This plot shows the absolute total drift relative to the RTK GPS ground truth, resulting in a total of 4m of drift.