As a reach goal for this spring validation experiment, our team has decided to implement basic autonomous capability into our system. It uses pure point cloud localization for state estimation, coupled with colorized point clouds for visualization.
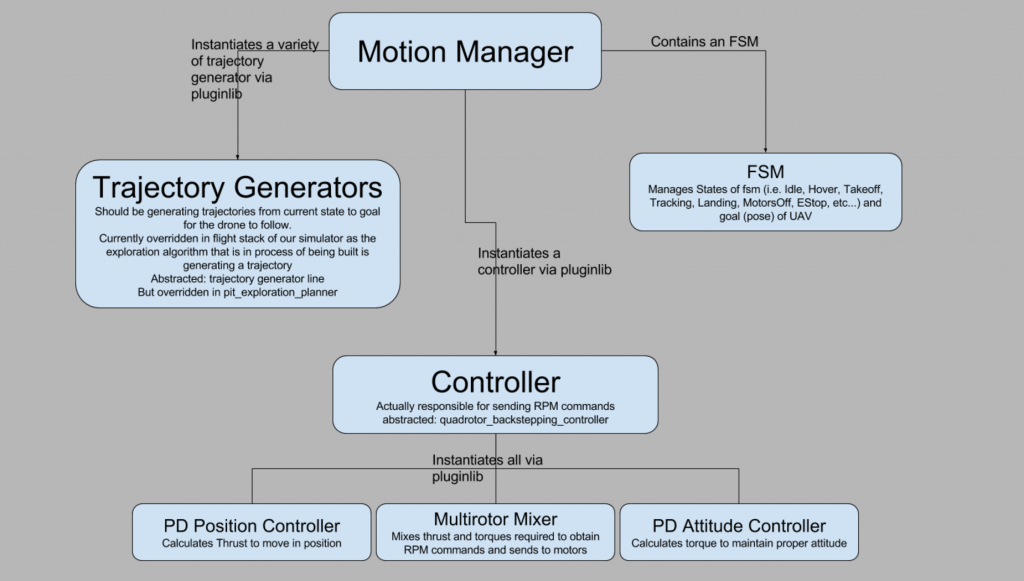
Below is a visualization of the architecture of our trajectory planner and motion manager software packages.
Work is underway to integrate our work in simulation with a physical mini-quadrotor; eventually scaling up to the full size hexrotor for full system integration.