The following system level requirements must be achieved to complete the objectives of this project.
System Description
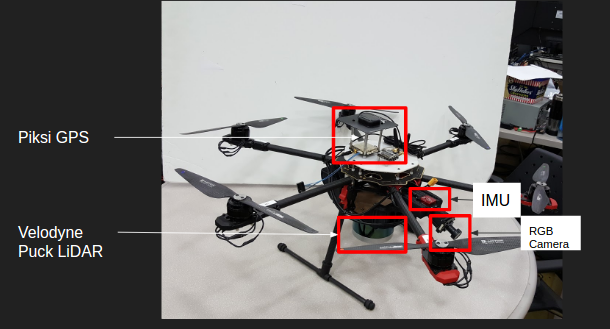
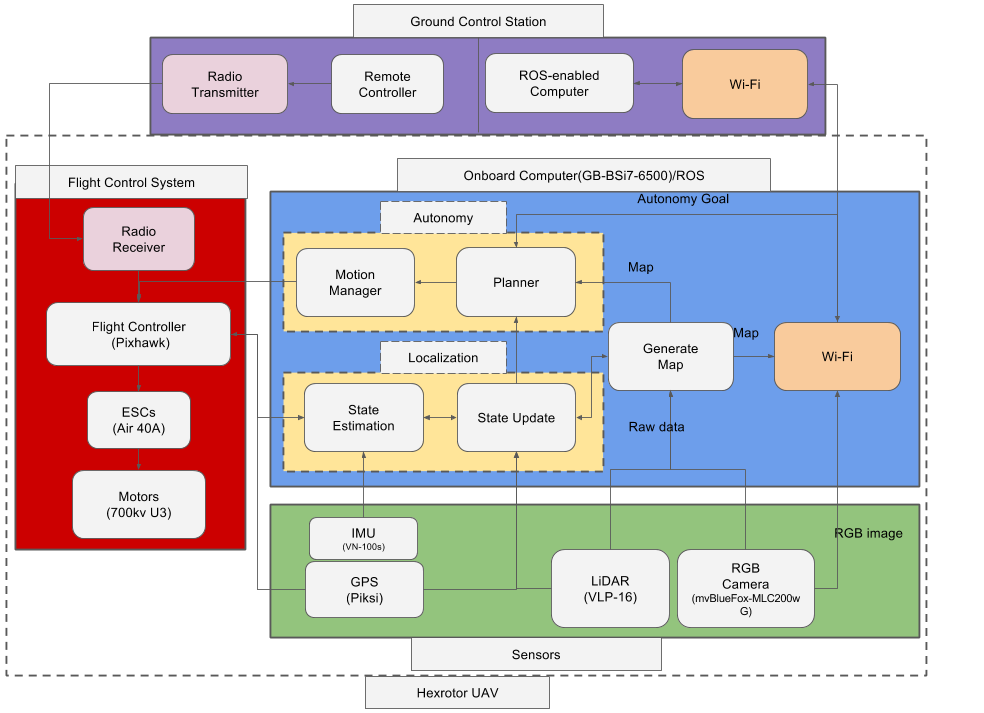
The goal of the perception subsystem is to map the systems surroundings and localize itself within the map. The map itself must be capable of containing multiple spectral modalities. The system must also operate in a GPS-denied environment. The perception subsystem consists of a number of onboard sensors. Specifically, these are the LiDAR, RGB camera, IMU, and GPS. The LiDAR and IMU are the workhorses of the SLAM algorithm. The RGB camera is used for coloring our map with visible light spectral information. The GPS is not operating with our SLAM algorithm but is mounted specifically to be used as a ground truth for testing.
Flight Control System
This consists of the PixRacer flight controller, ESC32 electronic speed controllers, and the propellors. This subsystem mainly concerns controlling flight. This involves calibrating and configuring the Pixracer and ESCs to ensure stable flight.
Onboard Computer
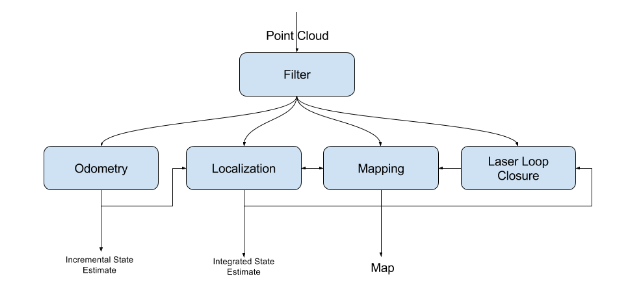
This subsystem includes the SLAM algorithm as well as the physical board itself. This system is responsible for processing sensor data and computing the map and an updated state estimate.
Critical Performance Requirements
- Fly at a minimum speed of 0.25 m/s
- Generate a map with a voxel size of at most (50 cm)^3
- Be capable of storing a minimum of two imaging modalities in map
- Map 50,000 m^3 in at most 15 minutes
- Localize accurately so that drift in pose is at most a meter a minute
- Map with errors less than 10%
- Update map with fresh sensor data at 1 Hz
- Provide map back to user at least .5 Hz
- Be tele-operable at a range of at least 100m
Non-functional Requirements
-
- Must have enough battery to operate for 15 minutes
- Additional sensors should be easy to integrate into software.
- Battery should be easily accessible for hot swapping on successive runs
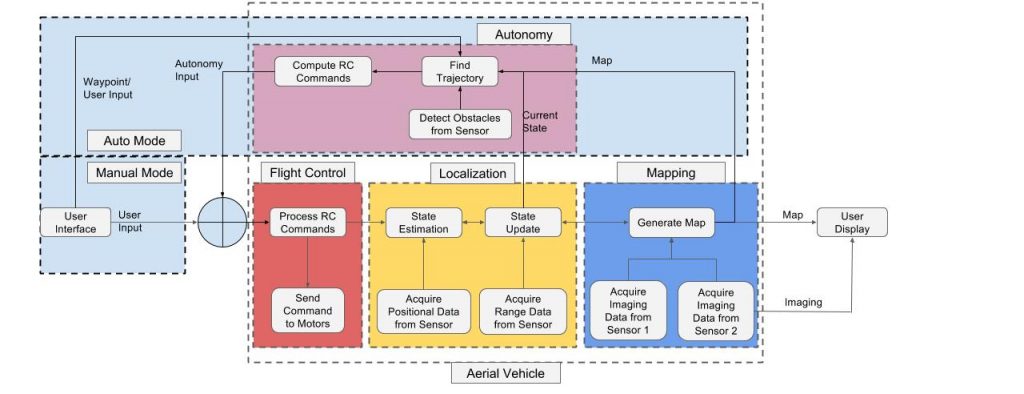
Functional Architecture
Cyberphysical Architecture