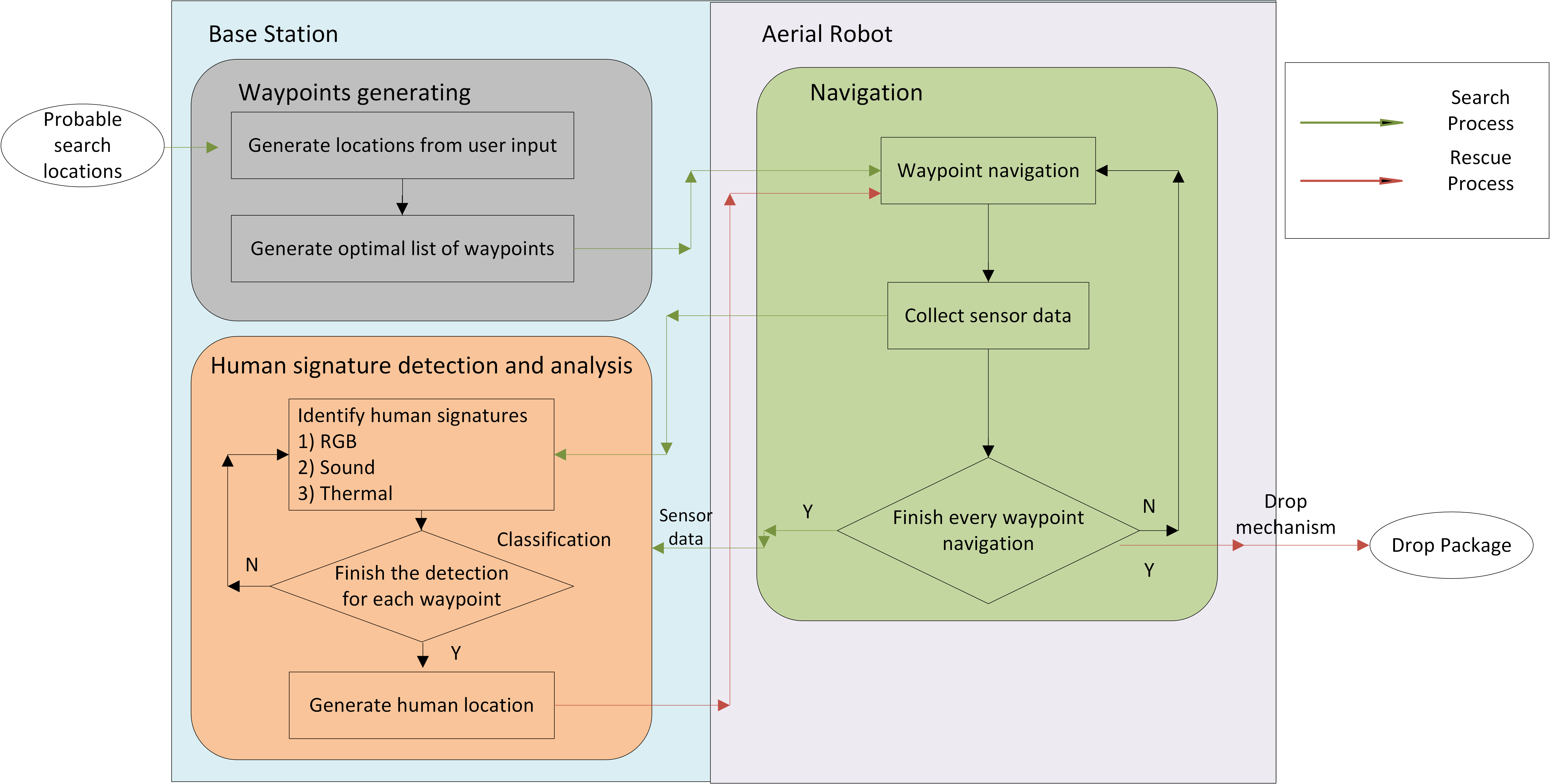
The architecture is described below as a sequence of functions:
- A mission begins with the user providing a list of geographic zones where the system should focus the search on. This information is then translated to GPS coordinates by the system and an optimal navigation path is generated as a list of ordered waypoints.
- The aerial system navigates to the list of waypoints by flying with a back and forth pattern. After following this pattern, the drone will be able to capture reliable sensor data at each waypoint.
- Once the waypoints are navigated and sensor data is collected, the drone returns to the ground station and initiates a data transfer.
- Once the data is available, the ground station runs sophisticated algorithms to identify human signatures from the data and their precise locations.
- The aerial system then navigates to the rescue location and drops a rescue packet as accurately as possible.