This section lays out the tasks planned for each of our functional subsystems and project management.
High-level Work Breakdown

Detailed Work Breakdown
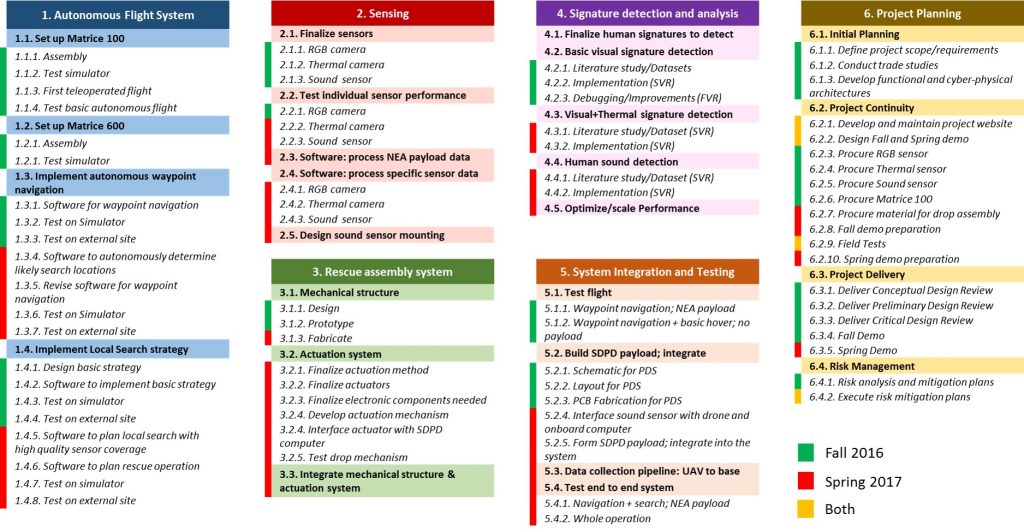
Project Planning, Continuity and Delivery tasks
Initial Planning
- Define scope of the project and the requirements.
- Conduct trade studies for parts and approaches.
- Finalize functional, performance and cyber-physical requirements.
Project Continuity
- Develop and maintain project website.
- Design Fall and Spring demo.
- Procure parts.
- Fall demo preparation.
- Field Tests.
- Spring demo preparation.
Project Delivery
- Deliver Conceptual Design Review.
- Deliver Preliminary Design Review.
- Deliver Critical Design Review.
- Fall Demo.
- Spring Demo.
Subsystem Tasks
Autonomous Flight System
- Ramp-up on Hexcopter operability.
- Demonstrate waypoint navigation in a controlled environment (as per FVR).
- Demonstrate waypoint navigation in a larger environment (as per SVR).
Sensing
- Finalize type and model of sensors to be used by conducting trade studies.
- Test/Validate sensors independently to ensure they meet performance requirements.
- Software to extract and process data for 1 sensor and associate coarse location and time information with the data.
- Build payload with all sensors.
- Test/Validate system to generate highly accurate sensor data keyed by spatio-temporal information.
- Software to extract and process payload data.
Localized Pattern Navigation
- Design strategy for localized navigation pattern.
- Software for planning localized navigation pattern with acceptable sensor coverage (as per FVR).
- Software for planning localized navigation pattern with high quality sensor coverage (as per SVR).
- Software for planning localized navigation pattern for rescue operation to drop packet accurately (as per SVR).
Rescue assembly system
- Evaluate and finalize the design and actuators for rescue assembly mechanism.
- Fabrication of mechanical structure and test functionality independently.
Global waypoint generation
- Software to generate optimal navigation path based on simplified coordinate input in a constrained environment (as per FVR).
- Software to translate region information from a Global Map to specific GPS coordinates for a large environment (as per SVR).
Signature detection and analysis
- Finalize set of signatures to be used for detection.
- Collect data and evaluate techniques for signature detection.
- Build a rudimentary signature detection module (as per FVR).
- Software for integration of the module with data obtained from payload sensors.
- Collect large amount of data to train more accurate models.
- Build advanced signature detection module (as per SVR)
- Performance optimizations/scaling to operate within acceptable time (as per SVR).
Integration Tasks
- Design and fabricate mountings for sensors (if required).
- Test flight with preliminary sensors.
- Implement data collection pipeline to transfer data from aerial subsystem to base station.
- Test end-to-end system for search only operation (as per FVR).
- Payload sensor integration and calibration during flight.
- Interface sensor payload with onboard processor.
- Integrate rescue drop assembly with Hexcopter and onboard processor.
- Test end-to-end system for search and rescue operation (as per SVR).