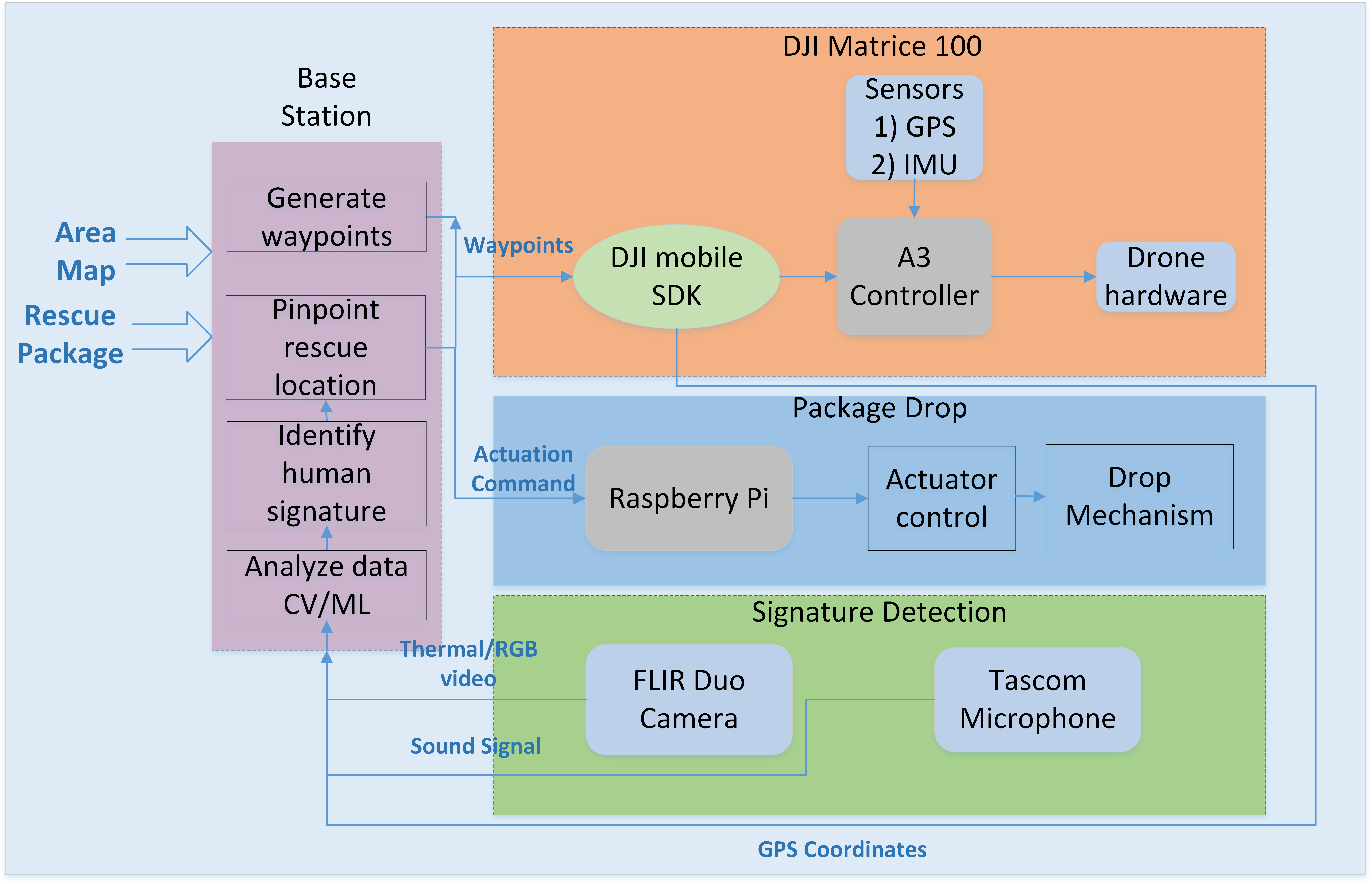
Autonomous Flight System
The autonomous flight system is based on DJI Matrice 100 platform. The GPS and IMU sensor embedded in Matrice 100 will primarily be used for navigation. The drone and navigation is achieved by interfacing with the DJI mobile SDK for generating waypoint and rescue missions.
Rescue Package Drop System
The Rescue Package Drop Payload System consists of the following components:
- Package Drop Mechanism: Custom designed and fabricated for the drone.
- Location Estimation algorithm: To compute locations for the detected signatures
- Onboard computer: Currently we use Raspberry Pi as the onboard computer. It is responsible for controlling the actuation of package drop mechanism. Also, the onboard computer serves as a server for communication between the ground station and the drone.
Sensing System
The sensors on the sensor payload consist of RGB and thermal camera as well as a sound sensor. The rationale behind using multiple types of sensors is so that the system can recognize different human signatures, and thus increase the possibility of finding humans.
After doing the trade study, we decide to choose the types of sensors as follows:
- Sound sensor: Tascom Microphone
- Thermal and RGB sensor: FLIR Duo R camera
Signature Detection and Analysis System
The Signature Detection and Analysis system resides in the base station and is responsible for analyzing all the sensor data and detecting human signatures.
Once the signatures are available, the software will generate a ranked list of candidates which will be presented to the operator to pick the best candidate. Once the candidate is available, the payload map can be used to lookup the coordinates of the location which will then be used by the drone for the rescue mission. Finally, those coordinates will be transferred to DJI onboard SDK for the next rescuing flight.