Subsystem Requirements:
To effectively fulfill the mandatory system functional requirements, our package drop mechanism is required to meet the following basic requirements:
The mechanism should:
- Be able to carry a 100g package
- Enable easy package attachment
- Have a good grip on the package throughout the flight
- Release the package easily without causing any damage
FVE Demo: Flight with package and package drop:
Nov 30, 2016
Testing
Rigorous testing was done to ensure that the mechanism worked, as required. A package weighing ~160 g and dimensions 10cm x 10 cm was made for this testing. Typically, two types of tests were done to ensure good performance:
- In-flight testing: Package was attached to the drone and the drone was flown at speeds reaching up to 3 m/s. This test was conducted 5-6 times. This test not only ensured us of the grip of the mechanism but also of the stability of the flight with the package
- Attach/release testing: Ease of package attachment and release was tested by performing this sequence 20-25 times
Nov 26, 2016
Design Implementation
The mechanism is basically a slider-crank mechanism mounted on a 3-D printed ABS body, facilitating required motion of the slider. Various components of the mechanism are highlighted in Figure 3.
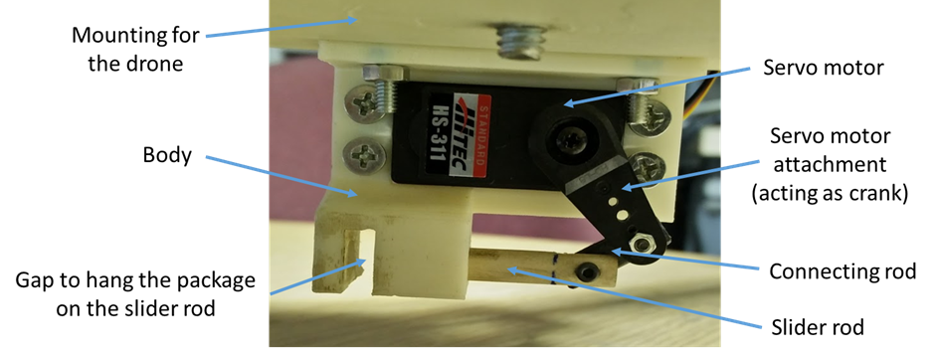 Figure 4: Final fabricated Package Drop mechanism
Figure 4: Final fabricated Package Drop mechanism
The mechanism consists of the following main components:
- Servo motor: To actuate the mechanism
- Servo motor attachment: acts as the crank
- Connecting rod: 3-D printed (ABS); to connect crank with slider
- Slider rod: made of wood to keep it lightweight while providing sufficient strength
- Body: 3-D printed (ABS); to provide mounting for the servo motor, passage for the slider rod, and space for attaching a package to the mechanism
Control of the mechanism for FVE was implemented using a Raspberry Pi mounted on the drone. Raspberry Pi and its housing are shown in Figure 3. We created a server on Raspberry Pi and sent HTTP calls to it, with required servo angle as the parameter, using a phone. Raspberry Pi, in turn, commanded the servo motor to rotate by the specified angle to open/close the mechanism.

Figure 5: (a) Raspberry Pi used to command the mechanism, (b) Housing for Power supply and Raspberry Pi
Nov 22, 2016
Final Design
We went over one more design which is much simpler, compact and does not depend on motor’s torque for locking the package.
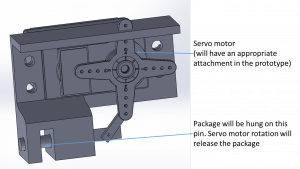
Figure 2: SolidWorks model for simple servo-driven pin lock for hanging a package
With this design, there is a concern of the hanging package affecting our drone’ dynamics. But since our package has to weigh just 100g, we don’t think it will be much of an issue. For now, we are going with this design and will start fabricating it. Flight-testing with the mechanism might change our decision later. Figure 2 shows the SolidWorks model.
Nov 19, 2016
Initial Design
Inspired by the “double-door opening” mechanism used by Amazon on one of their package delivery drone’s prototypes, we came up with a single door design for our mechanism.
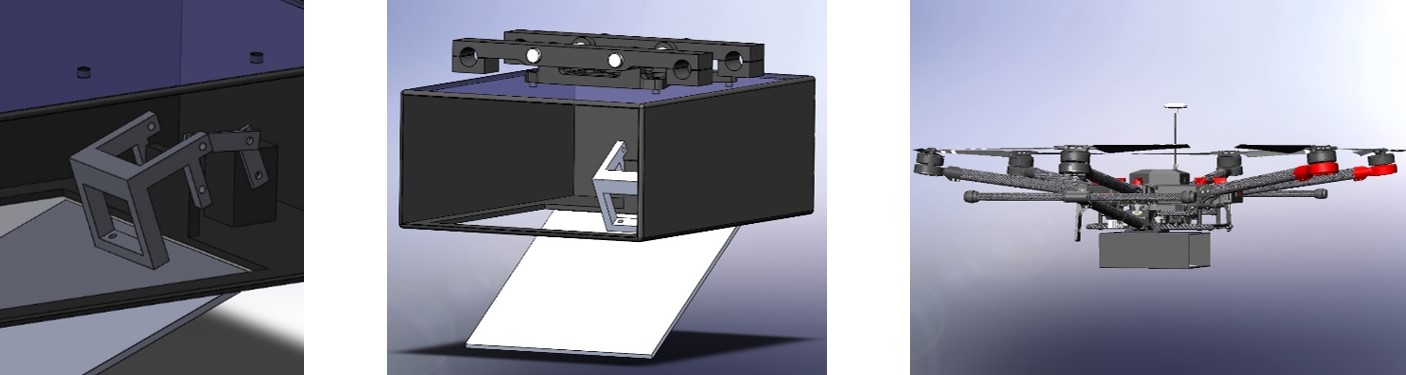
Figure 1: Initial design of Package drop mechanism (a) Single-door opening mechanism actuated by a servo motor, (b) Resultant SolidWorks assembly with mount for Matrice 600 (sponsor’s drone), (c) Assembly mounted on Matrice 600
The design developed, shown in Figure 1 above, has the following advantages:
- Flexible, to an extent, in terms of allowed package dimensions
- Ease of loading: You just need to place the package inside from the front door (not shown in the model) and tighten the straps (not shown in the model). The straps will go over the package and would be tightened from outside.
- Firm grip over the package: With the straps, the package would be tied to its position and thus, not move inside the box, preventing any effect on the drone’s dynamics
But this design has some disadvantages too:
- The door has to be held closed by the servo motor’s torque, which is a little bit of risk. It would have been better if the lock was some physical structure rather than the torque applied by the motor
- The mechanism is a bit bulky (mainly because of the box) and still not very easy to fabricate