1. Progress Report Presentation Schedule:
| Progress Review 1 | |
| Date | 15 October 2015 |
| Presenter | Eitan Babcock |
| Deliverables | Sensors & Motor Control Demonstration |
| Progress Review 2 | |
| Date | 22 October 2015 |
| Presenter | Shu-Kai Lin |
| Deliverables | Schematic of Small Test Platform |
| Algorithm Descriptions | |
| Orders placed | |
| Progress Review 3 | |
| Date | 29 October 2015 |
| Presenter | Samuel Wang |
| Deliverables | Mechanical Assembly Progress of Small Test Platform |
| ICD & ICC Progress | |
| User Interface Completion | |
| Localization Proof of Concept | |
| Progress Review 4 | |
| Date | 12 November 2015 |
| Presenter | Ryan Gibbs |
| Deliverables | Manual Control of Quadcopter |
| Localization Algorithm gives Position | |
| Trajectory Algorithm Progress Report | |
| Progress Review 5 | |
| Date | 24 November 2015 |
| Presenter | Kelsey Ritter |
| Deliverables | Electrical integration of quadcopter |
| Electrical integration of deck | |
| Localization algorithm gives location and orientation of deck | |
| Prediction algorithm predicts swell | |
| Trajectory algorithm generates flight commands | |
| System integration progress and challenges | |
| Progress Review 6 – FVE | |
| Date | 10 December 2015 |
| Presenter | Team Kingfisher |
| Deliverables | Sensors & Motor Control Demonstration |
| Progress Review 7 | |
| Date | 27 January 2016 |
| Presenter | Ryan Gibbs |
| Deliverables | Fisheye Lens Calibration |
| Power Distribution Board Rework | |
| Coordinate Frame Transformations | |
| Progress Review 8 | |
| Date | 10 February 2016 |
| Presenter | Samuel Wang |
| Deliverables | Optical Flow and Height Sensor Testing |
| New Mounting Layout | |
| Initial State Estimator | |
| Stable Hovering | |
| Progress Review 9 | |
| Date | 23 February 2016 |
| Presenter | Shu-Kai Lin |
| Deliverables | Static Deck Landing |
| Initial Prediction in ROS | |
| State Estimator Fully Implemented | |
| Progress Review 10 | |
| Date | 14 March 2016 |
| Presenter | Eitan Babcock |
| Deliverables | Moving Deck Prototype |
| All sensors integrated to Odroid | |
| Lighting Invariance | |
| Stability with Deck Motion | |
| State Estimation with Deck Motion | |
| Progress Review 11 | |
| Date | 24 March 2016 |
| Presenter | Ryan Gibbs |
| Deliverables | Dynamic Landing |
| Progress Review 12 | |
| Date | 7 April 2015 |
| Presenter | Samuel Wang |
| Deliverables | Aggressive Dynamic Landing |
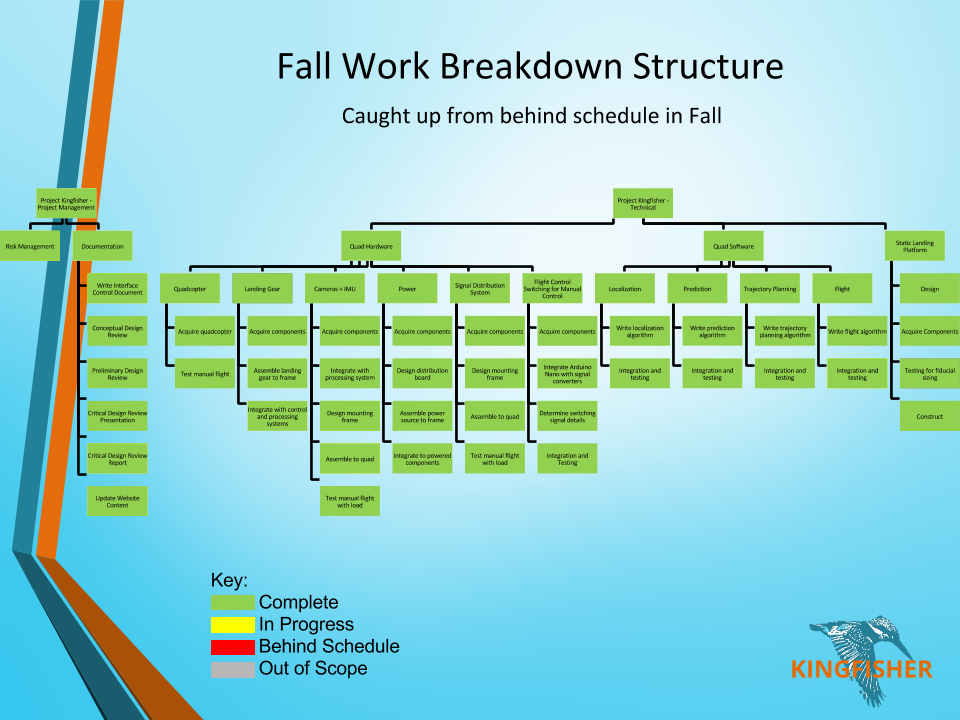
2. Work Plan and Tasks

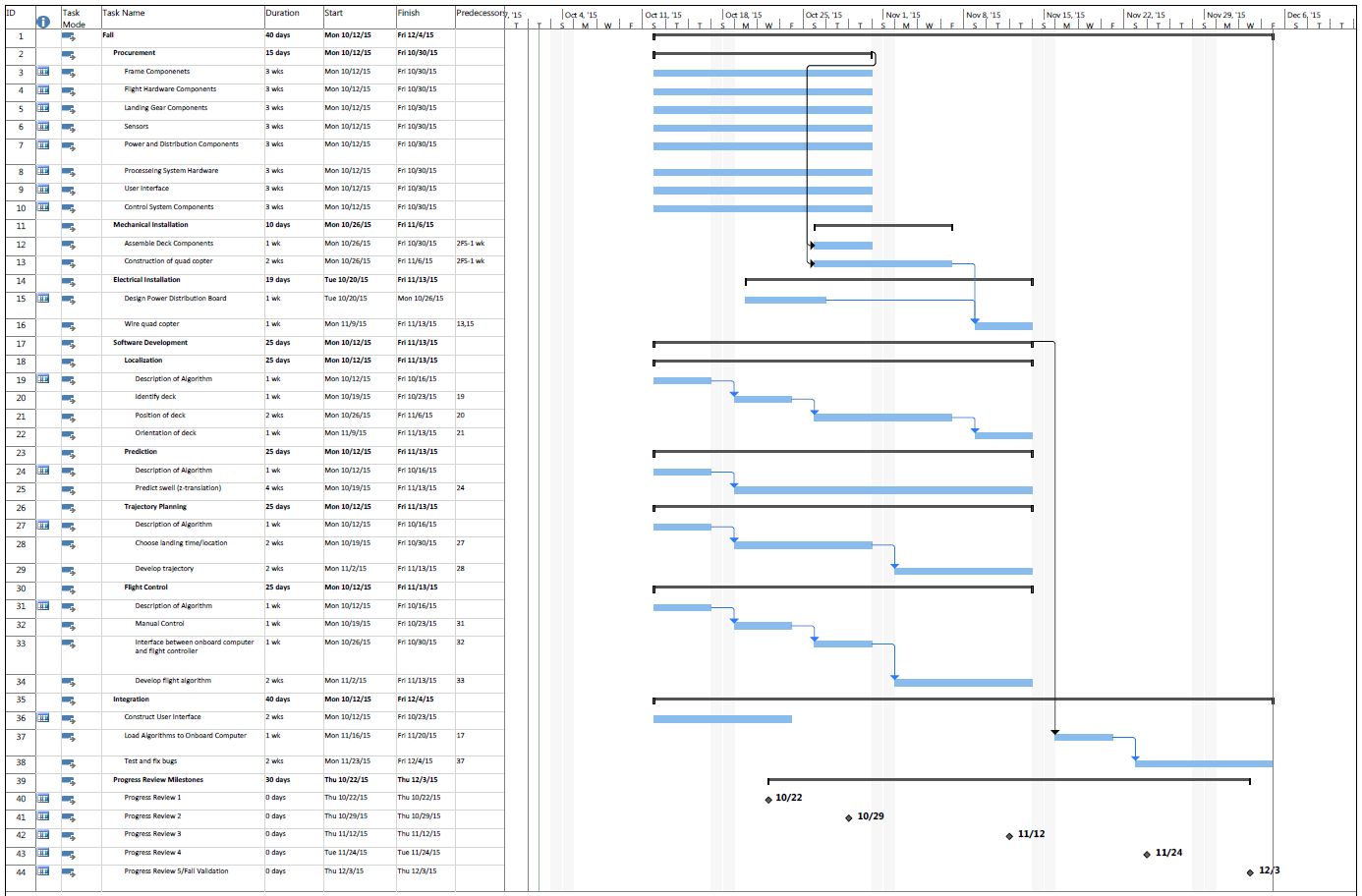
3. Fall Gantt Chart
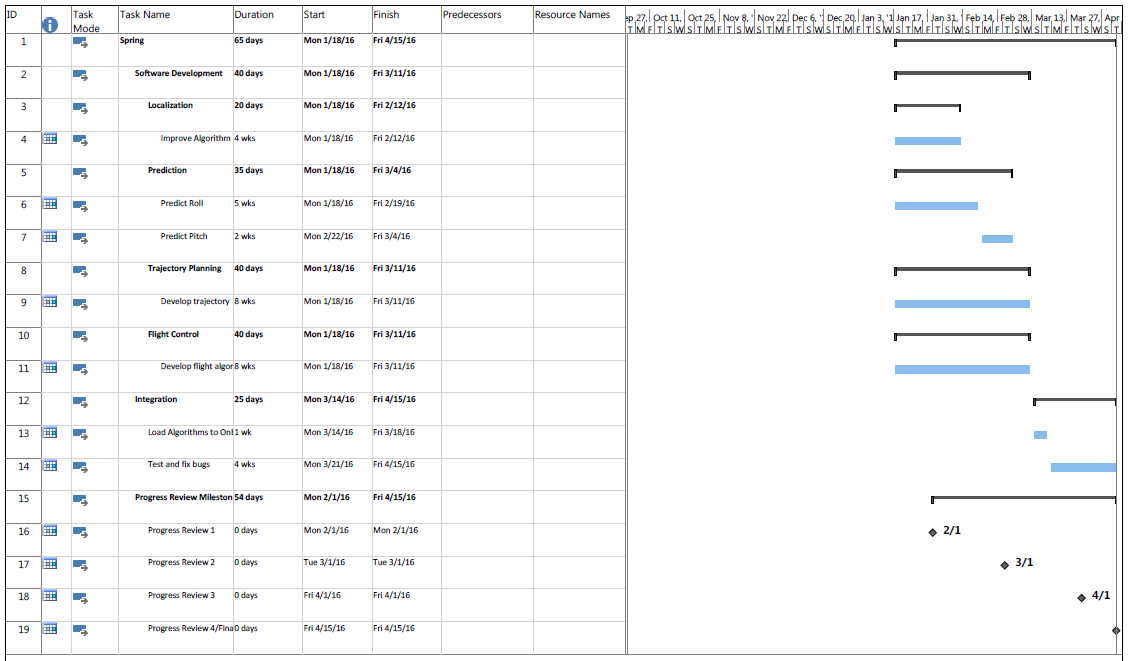
4. Spring Gantt Chart