1. Visual Structure
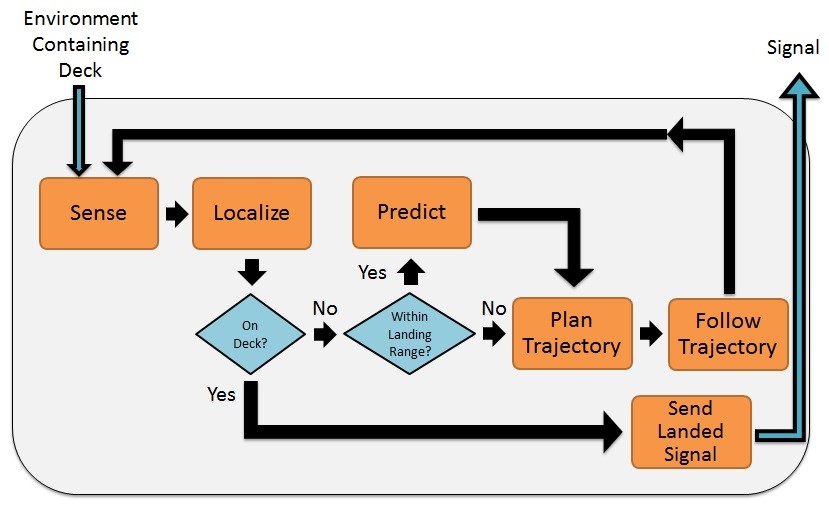
2. Input:
The input to the autonomous landing system is an environment containing the ship deck. It should be noted that for our system, the assumption is made that the rotorcraft and the ship deck are the only objects in the environment besides the ground/water. We assume that there are no obstacles either on the deck or in the path of the rotorcraft.
3. Sense:
The sensors output data about the environment at the maximum data rate that can be handled by the system.
4. Localize
At long range, the position is sufficient to construct a heading for the rotorcraft to approach the deck. Once within landing range, a constructed frame is used to determine the relative position and orientation of the ship deck with respect to the rotorcraft.
5. Predict
Using the history of deck poses, the motion of the ship deck is modeled in time. Once sufficient data is collected for an accurate model, the model is used to predict the future pose of the ship deck.
6. Path Trajectory
At long range, the planned trajectory is simply the shortest distance between the rotorcrafts current position and the detected position of the ship deck. Once within landing distance, the prediction model for the motion of the ship deck is used to determine which windows in the deck’s cycle are safe to land during. Taking the system’s current position and average flight velocities into account, a trajectory is planned that times the landing with one of the future windows for safe landing.
7. Follow Trajectory
The desired trajectory is fed from the system’s computer into the flight controller for the rotorcraft. The rotorcraft then executes the planned trajectory until it is altered or the rotorcraft lands successfully.
8. Send Landing Signal
Upon landing, the system needs to send a confirmation signal to the user that it has landed. This allows the user to issue further commands or to perform some manual task on the rotorcraft.
9. Outputs
The system output is a landed rotorcraft and an output signal to the user that the system has landed successfully. The system will then enter an idle state awaiting further instructions, releasing autonomous control of the rotorcraft.