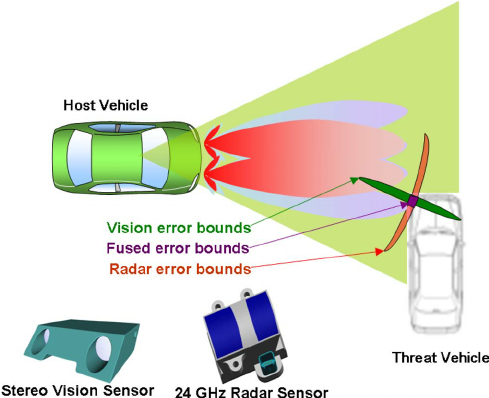
Stereo vision and radar are two sensor systems that are commonly used for short-range and long-range perception, respectively. In this project, we aim to combine these two sensor systems to develop a stand-alone perception system for use in autonomous vehicles. By doing so, we plan on creating a system that can simultaneously perceive in both the long and short range. Using this, we aim to create a reliable virtual environment around the vehicle that the user can use to gain information about his/her driving surroundings. Eventually such a system would allow for cheaper, more accessible, and more robust self-driving cars.
The current overall system can be roughly divided into two parts: the hardware and the software. The hardware system contains power supply, two Point Grey cameras, and one Delphi ESR radar. The software system contains the functions and algorithms for stereo vision, object detection, and radar processing. The basic structure of our current system is shown as the following:
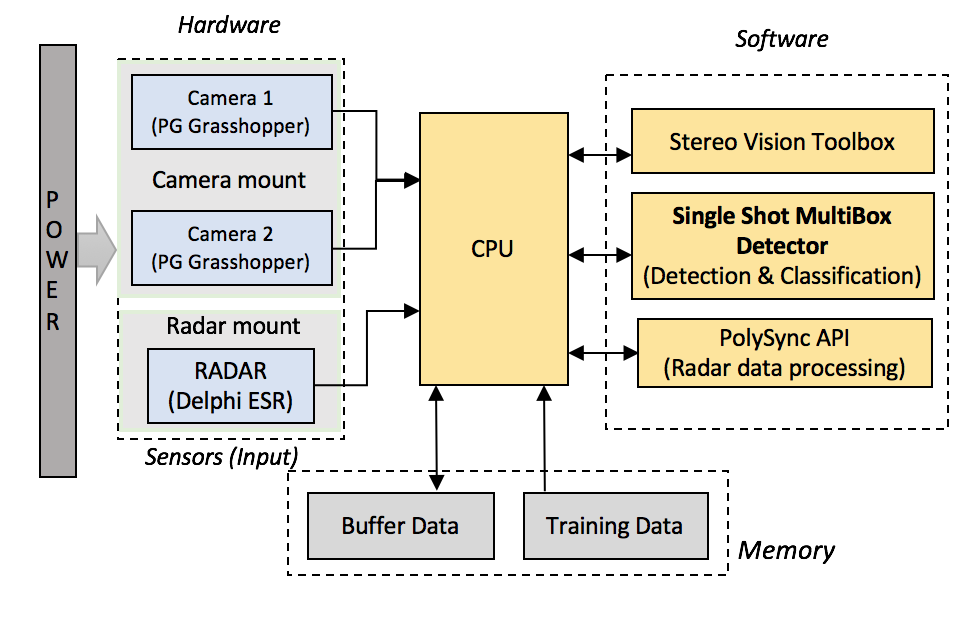
Figure 1. Current System Status