This subsystem includes the Delphi ESR 2.5 radar unit and our mounting solution for installing it onto the test car It also includes the DC-to-DC step-up converter that provides a stable 24 VDC to power the radar unit, using the car battery as a source. The ESR 2.5 radar unit has been used successfully by Delphi for automotive perception and autonomous driving applications. This radar sensor simultaneously detects close range and long range objects in the driving environment at a rate of 20 Hz. We can connect to the radar sensor using either CAN bus or ethernet. As mentioned earlier, the radar sends tracking-level data via the CAN bus and it sends detection-level (raw) data via ethernet.
Results: The final radar mounting solution that we developed is shown in Fig. 1 below. The radar unit is designed by Delphi to be weatherproof, so we directly mounted it onto the grille of the car using 3D-printed mounts. We were careful not to obstruct the sensor with any metal or non-uniform surface. After failing to power our sensors in the car using our power distribution PCB, we switched to an off-the-shelf converter. This converter proved to be robust and it was able to consistently power the radar unit without overheating or voltage jumps. Unfortunately, we found that the data from the CAN bus (the tracking data computed by the radar’s built-in clustering method) proved to be futile for tracking purposes due to high noise and error. We later found a Kalman-based filtering method for the detection-level data points acquired via ethernet. This allowed us to accurately determine the positions and velocities of detected targets.
Radar Visualization in Rviz
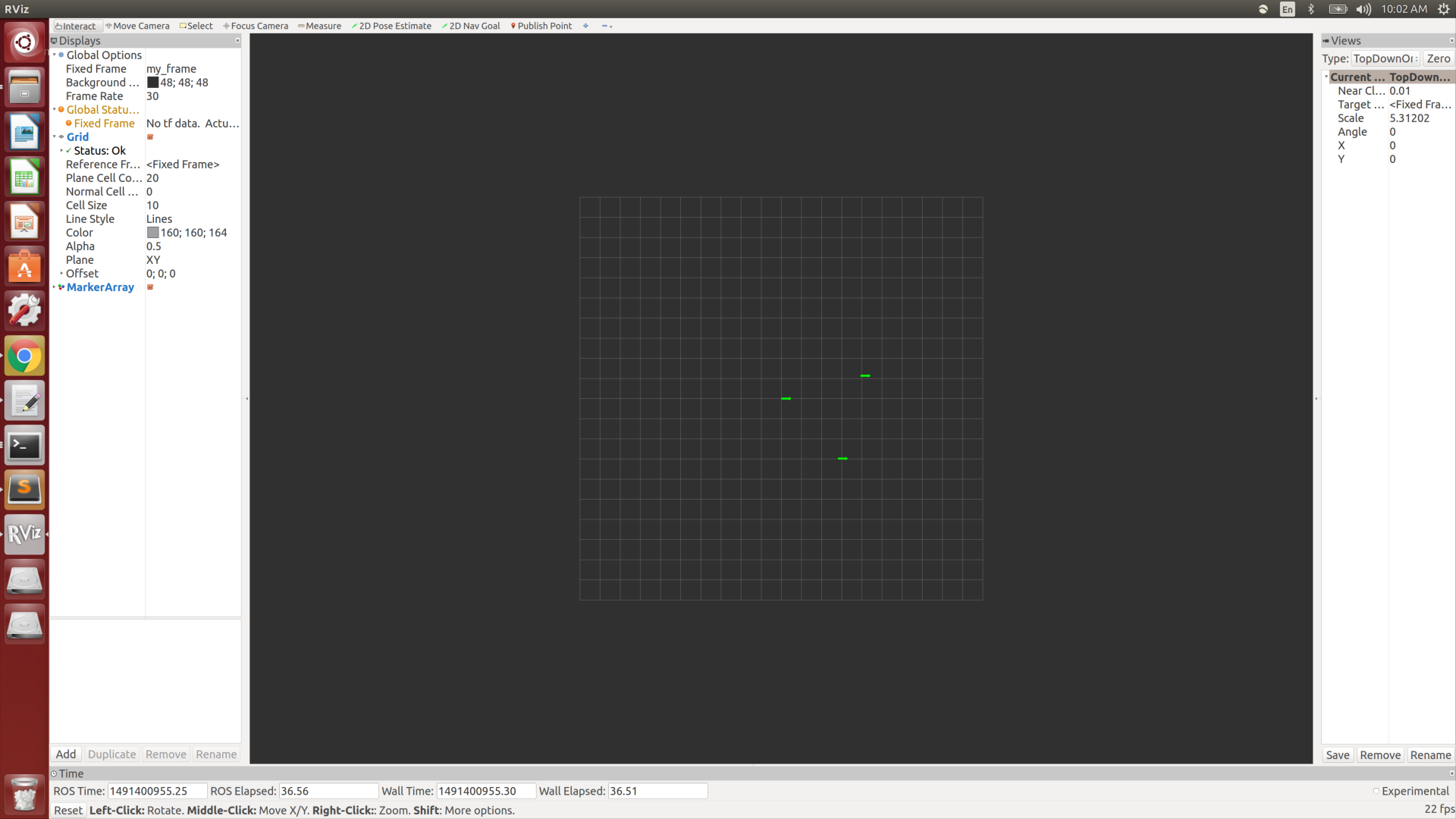
Figure 1. Radar Visualization