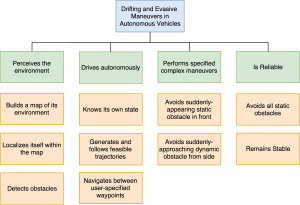
Our requirements encompass the features of autonomous vehicles with an ability to perform evasive maneuvers. The robot must be able to perceive its environment and know its state within it. It must be able to navigate from point to point in the environment, and do so reliably without hitting obstacles or going unstable. On top of these standard requirements, our project also requires the robot to be capable of advanced evasive maneuvers, while remaining stable.
Functional Requirements
| FR1 | Localize itself and obstacles around it | m-F |
| FR2 | Drive autonomously between two user-specified waypoints | m-F |
| FR3 | Reliably reach the goal point | m-F |
| FR4 | Avoid static obstacles | d-F, m-S |
| FR5 | Avoid a suddenly-appearing obstacle while driving on a straight path | m-S |
| FR6 | Maintains stable driving at all times | m-S |
Non-functional Requirements
| NF1 | Have an emergency kill switch/manual override it | m-F |
| NF2 | Be compact (1/10th scale RC car) | m-F |
| NF3 | Be physically robust | m-F |
| NF4 | Be robust to varying lighting conditions | d-F, m-S |
| NF5 | Be robust to varying surface conditions | m-S |
| NF6 | Cost less than $5000 to develop | m-S |
Performance Requirements
| PR1 | Localize itself to within 30cm (1 vehicle length) accuracy | m-F |
| PR2 | Drive from an initial point to a user-specified goal point with only a ‘START’ command from human input |
m-F |
| PR3 | Avoid static obstacles of sizes larger than 5cmx5cm5cm, located with a clearance of at least 1 vehicle length between each other, with a 100% success rate, at low speeds (no wheel slipping) |
m-F |
| PR4 | Reach the specified goal point within a 30cm radius 70% of the time | d-F, m-S |
| PR5 | Avoid a suddenly-appearing (but otherwise static) obstacle while driving on a straight path at a speed greater than 0.5m/s. The obstacle will appear instantaneously at a distance 30cm or greater away from the system. |
m-S |
m=mandatory, d=desired, F=fall, S=spring