A huge drawback of our spring platform was the large mass of the system. Much of the weight was from the Energizer battery pack that powered the computer and sensors. For our spring semester platform, we decided to leverage the Power Distribution Board we designed as part of the project coursework. We rewired the power system to have the PDB power both the motors as well as the computer and sensors from the same battery, hence eliminating the need for a separate, bulky battery pack.
The PDB requires a 3S LiPo battery as an input power source, and provides regulated 12V/2A, 5V/5A output lines, as well as a bypass (with reverse voltage and overcurrent protection) output to the VESC. The 12V line powers the Jetson TX1 and the Hokuyo LIDAR, while the 5V line powers the servo motor and RF receiver.
A power MOSFET switch was added at the output to allow for an external signal to stop the power supply to the VESC (and consequently the motor). This serves as our hardware emergency stop.
Fall semester
- Energizer 18000mAh Battery Pack:
- 12V/2A Output for Jetson
- 5V/2A Output for USB Devices
- Protection circuits in-built
- Plug and play
- Acts as main power supply for now until PDB is ready

2. Power Distribution Board
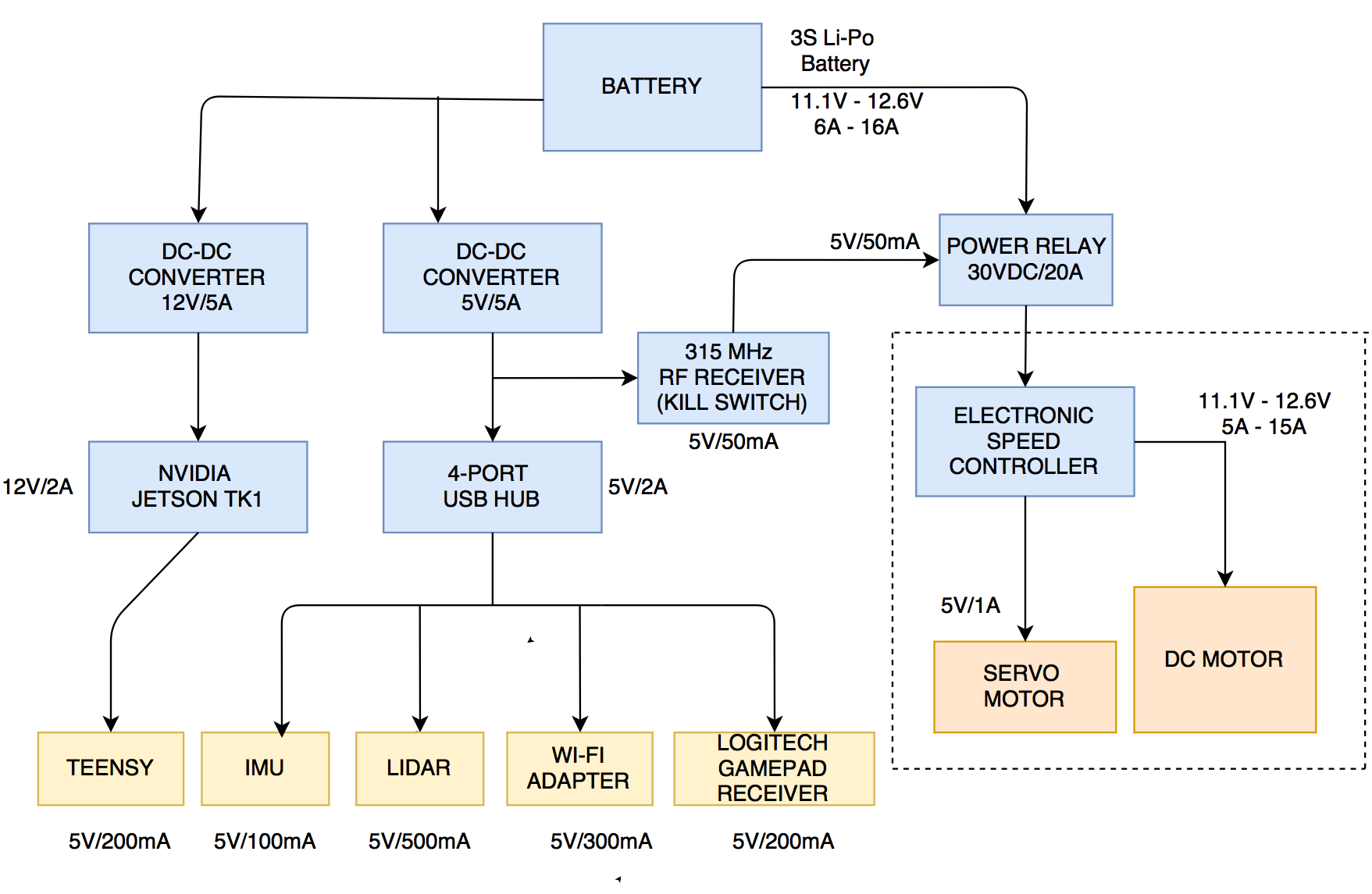
With a new power distribution PCB, we can power our entire system with a single LiPo battery pack. The overview of the system is shown below.
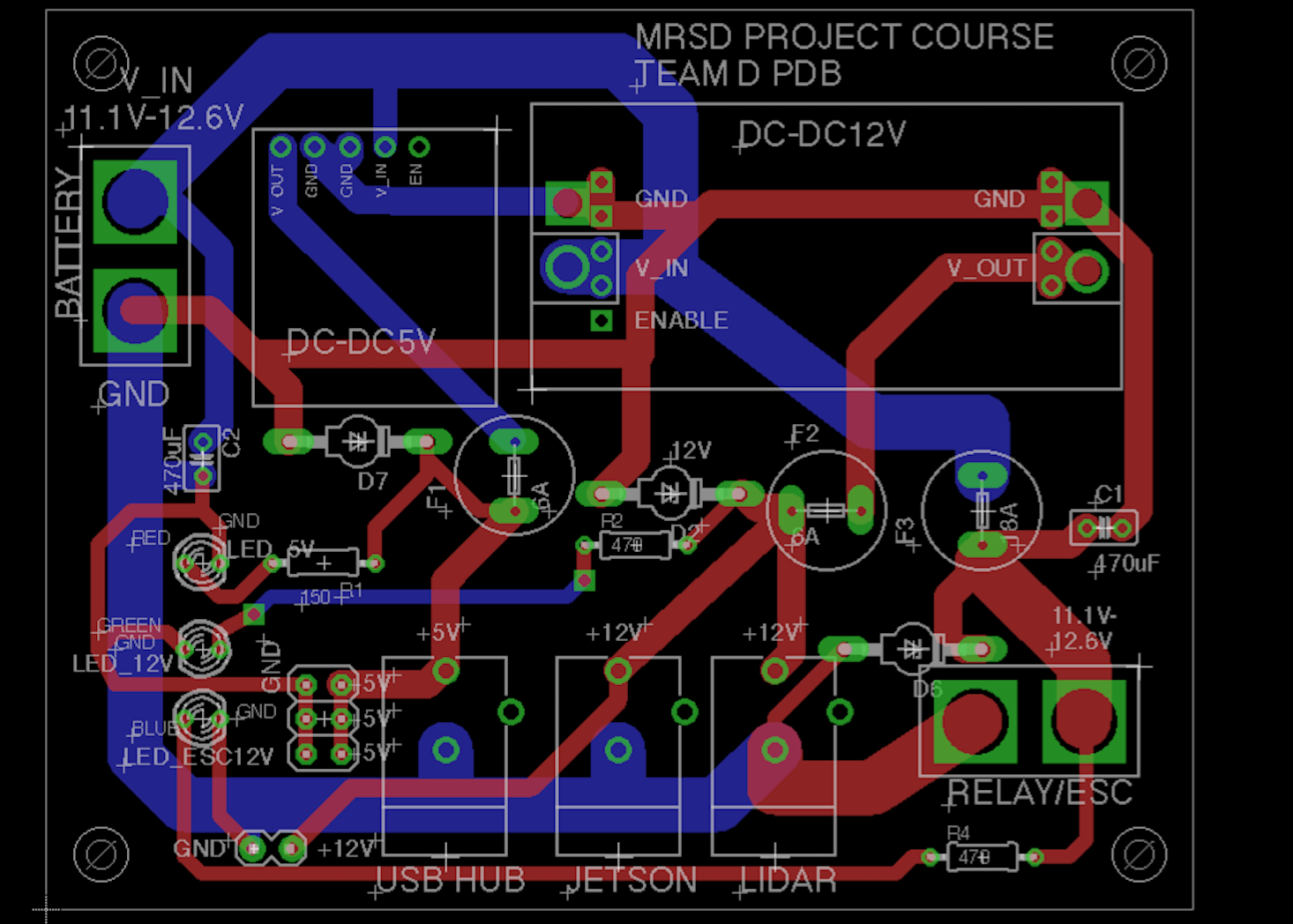
Detailed schematics and board layout can be found in the Drawings, Schematics & Datasheets page.
The RC car is powered using one battery (Li-Po). It powers up the 5V USB-HUB, 12V – JETSON as well as the Electronic Speed Controller. The battery is a 3 cell series combination which provides a maximum of 12.6 volts on full charge. We decided to go for one battery instead of two as the mass of the vehicle is critical to its performance. Since the Jetson requires 12V supply, we shall have a DC-DC converter to up-scale the voltage when required . The DC-DC converter would also account for the voltage regulation and overshoot of voltages. We have a fuse (rated 5A) in series with the DC-DC converter to ensure the circuit is protected from overshoot in currents and does not damage the Jetson. To give an indication of the power supply to the Jetson, we shall have a Led connected in parallel to the voltage line indicating correct supply of voltages. For the 5V voltage line connecting the USB HUB we have a Polulu DC-DC voltage regulator to convert the 12V down to 5V. The 5V line has a fuse of 8A and an Led connected in parallel to indicate the power supply. Lidar is interfaced with Jetson and requires a 2.5W power supply. The Logitech controller is interfaced to the Jetson using a wireless USB receiver. The Jetson processes the commands from the receiver and updates the Electronic Speed controller through the Teensy.
Electronic speed controller (ESC) is interfaced with the Brushless DC motor and the Servo Motor. The advantage of having the ESC is that it behaves as real time odometer and helps to determine the position of the RC car more accurately. Teensy, secondary on-board computer chip is interfaced with ESC to control the motors. Teensy is also interfaced to the primary on-board computer (Jetson).
For the 12V line connecting the Electronic Speed Controller we shall have a Radio frequency controlled relay in series. The Radio frequency receiver is operated at 315 Mhz. The receiver shall be toggled by a transmitter. The receiver is connected in series with the relay which connects to the Electronic Speed Controller. The above mentioned design is critical to us because it acts as a kill switch for our operation i.e. if the vehicle spins out of control we would directly toggle the relay to cut off the supply to electronic speed control (ESC). The overshoot in voltages is handled by the ESC as it terminates its operation when the input voltage reaches a threshold value. A fuse rated at 20A is connected in series to the ESC to limit the current in the line.
Our PDB has been completed, assembled and fully tested as of the end of Fall semester.