- Calibrated IMU interfacing with GUI on ROS
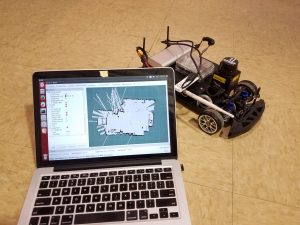
- Hokuyo Lidar interfacing with ROS, Hector SLAM creating map
- Robot dynamics parameters (for simulation)
- Wheelbase (front to rear wheels) = 0.255m
- Wheel width = 0.175m
- Mass = 2622g
- Front wheels to COM = 0.135m
- COM to rear wheels = 0.122m
- Footprint = 0.3m x 0.43m
- Lidar scanning plane: 0.127m
- Robot height = 0.145m
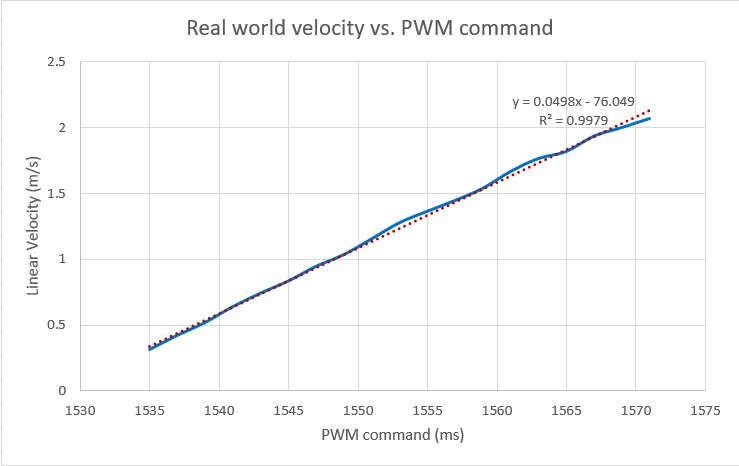
- Characterized PWM commands to real world robot velocities