Spring’17 Work Schedule
Below are our work breakdown structure and milestones for the project. For the most part, we managed to stay on schedule throughout the two semesters working on this project. Setting weekly goals and assigning responsibilities for the goals played a big factor in this.
At the end of the Fall semester, we were on schedule according to the plans we laid out at the beginning of the semester. We were able to achieve all of our requirements for the Fall Validation Experiment, and also get some preliminary results for spring development. However, we discovered towards the end of the spring semester that some of the assumptions we had made about our implementation were wrong. We assumed that integration of planning and perception would just be a matter of gluing code together, and that the system would work once that was done. We failed to account for time spent dealing with unforeseen issues in integration and getting the system to perform up to the requirements.
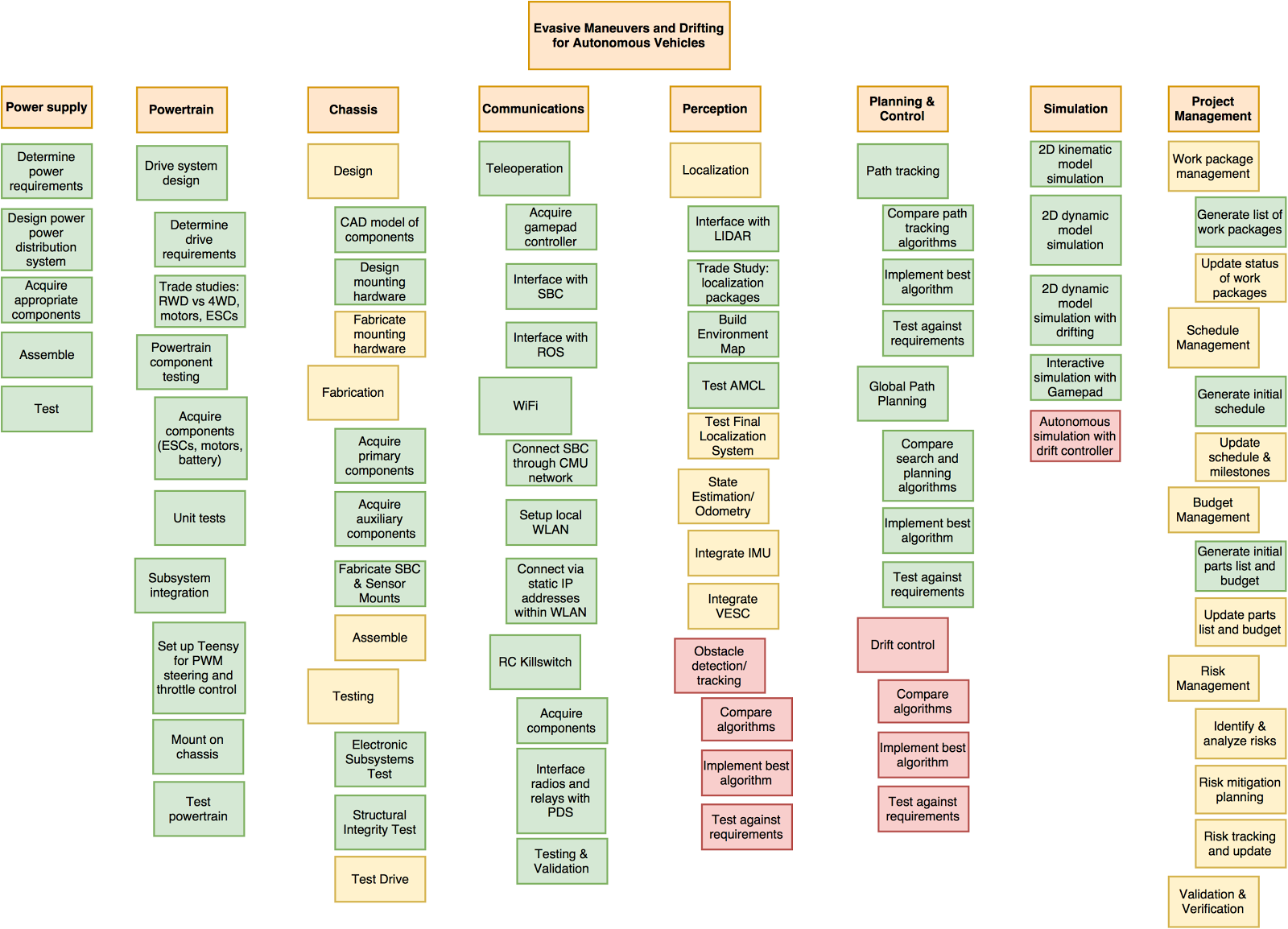
Work Breakdown Structure
 Spring Semester Schedule ( Completed ):
Spring Semester Schedule ( Completed ):
- Weeks 1&2 (1/17 ~ 1/27)
- Integrate computer,sensors with power distribution board on new RWD chassis
- Fine tune speed control on new platform
- Perform system identification for new platform
- Test navigation stack on new platform
- Identify candidate algorithms for control and obstacle tracking
- Weeks 3&4 (1/30 ~ 2/10)
- Evaluate candidate algorithms for control and obstacle tracking
- Use IMU to detect if robot is drifting
- Begin implementation of best algorithm for control in simulation
- Begin implementation of best algorithm for obstacle tracking on static robot
- Weeks 5&6 (2/13 ~ 2/24)
- Continue development and testing of control algorithm in simulation
- Continue development and testing of obstacle tracking algorithm
- Begin implementation of alternative algorithm for control in simulation
- Begin implementation of alternative algorithm for obstacle tracking on static robot
- Weeks 7&8 (2/27 ~ 3/10)
- Test control algorithm on robot
- Test obstacle tracking algorithm on moving robot
- Continue development and testing of alternative algorithm for control
- Continue development and testing of alternative algorithm for obstacle tracking
- Weeks 9&10 (3/13 ~ 3/24)
- Evaluate and compare performance of control algorithms
- Evaluate and compare performance of obstacle tracking algorithms
- Choose final set of algorithms to proceed with
- Begin integration of both subsystems
- Weeks 11&12 (3/27 ~ 4/7)
- Build test track
- Prepare alternate RC car as dynamic obstacle
- Finalize system integration
- Test final system performance
- Weeks 13&14 (4/10 ~ 4/21)
- Fine tune algorithm for driving on test track
- Fine tune algorithm for tracking the dynamic obstacle
- Final preparations for SVE
- Weeks 15&16 (4/24 ~ 5/5)
- Final preparations for SVE
Fall Semester Schedule (Completed):
- Week of Monday 10/17
- Get Odroid and Jetson TK1 set up with Ubuntu and ROS
- Set up ROS sensor interface for LIDAR
- Set up ROS sensor interface for IMU
- Design and fabricate mounting hardware for electronics: first iteration
- Finish work breakdown structure, schedule
- Progress Report 1: Thursday 10/20
- Finish task definitions for WBS
- Week of Monday 10/24
- Finalize mounting hardware design for first test platform
- Finish CAD models of components (chassis, vesc, RC receiver)
- Calibrate IMU
- Set up Teensy for PWM steering and throttle control
- Test Hector SLAM
- Start integration of Navigation stack
- Progress Report 2: Thursday 10/27
- Finalize mounting hardware design for first test platform
- Week of Monday 10/31
- Remote control through ROS
- Integrate localization system, test
- Fully integrate Navigation stack
- Implement nonholonomic planner
- Order final components
- Research RC car hardware (round 2)
- Select appropriate battery/power electronics
- Determine components for RC killswitch
- Preliminary Design Review
- Week of Monday 11/7
- Start working on autonomous point-to-point navigation
- Design, implement RC killswitch
- Progress Report 3: Thursday 11/10
- Week of Monday 11/14
- Fine-tune teb_local_planner
- Gazebo simulation for car and world (done)
- Fine-tune amcl (done)
- Robust hardware: add foam padding, reinforce weak points (done)
- Week of Monday 11/21 (Thanksgiving week)
- Validate autonomous point-to-point navigation
- System identification of robot dynamics
- Progress Report 4: Tuesday 11/22
- Week of Monday 11/28
- Final integration of robot subsystems
- Testing and validation of system-level requirements
- Fall Validation Experiment: Thursday 12/1
- Week of Monday 12/5
- FVE encore: Thursday 12/8
- Week of Monday 12/12 (Finals week)
- Critical design review presentation
- Preparation/planning for spring semester
- Critical Design Review report: Thursday 12/15